- Startseite
- Produkte
Produkte
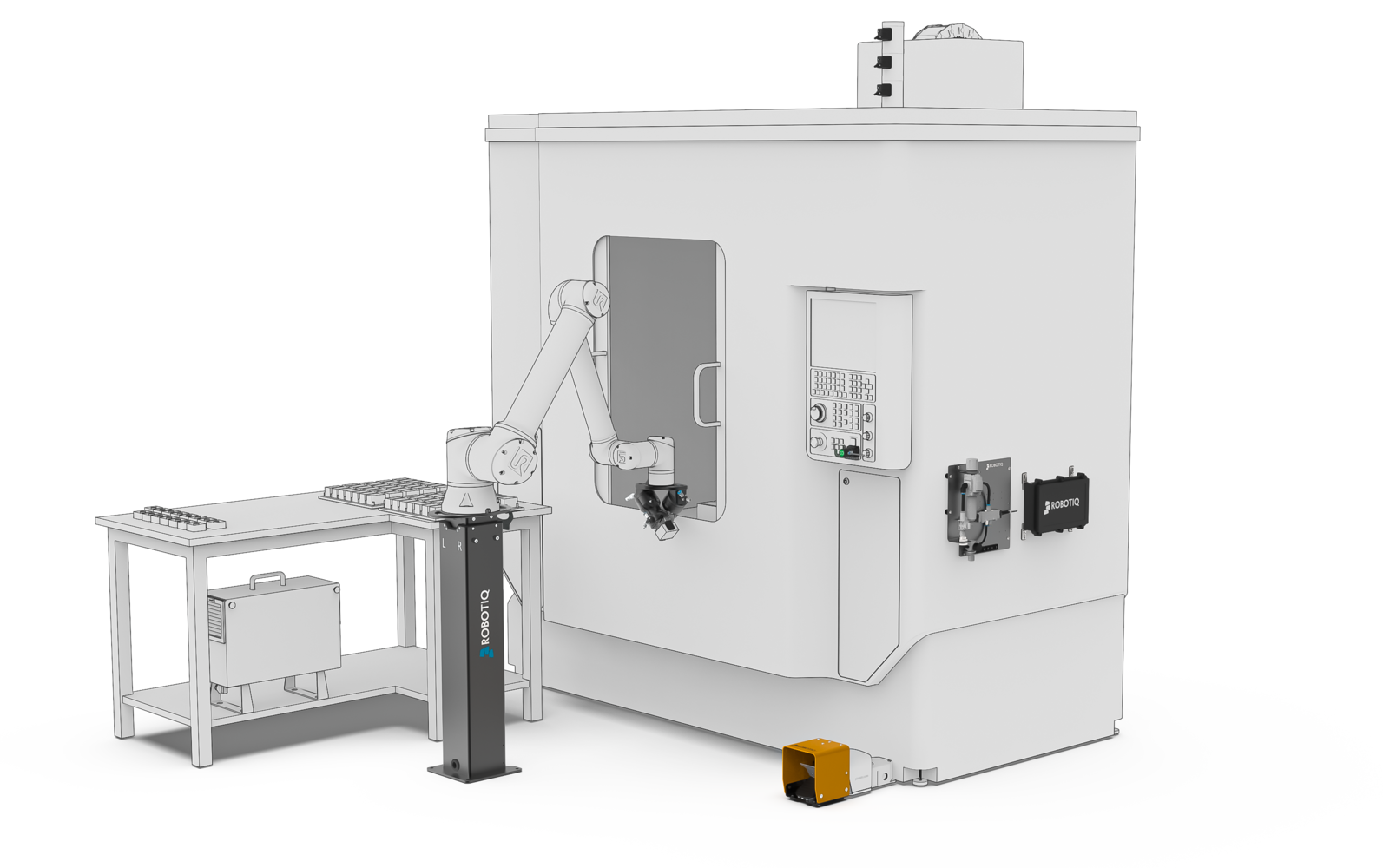
Maschinenbeschickungslösung
Maschinenbeschickungslösung
Greifer

2-Finger-Greifer 2F-85 und 2F-140
- Plug&Play bei kollaborativen Robotern
- keine Werkzeugwechsel und niedrigere Werkzeugkosten
- Aufnahme von Teilen verschiedener Größen und Formen
- Automatisieren Sie all Ihre Anwendungen mit einem Greifer
- Programmieren Sie Ihre Anwendung in wenigen Minuten

Adaptiver 3-Finger-Robotergreifer
Der 3-Finger-Greifer ist maximal vielseitig und flexibel. Er kann Objekte beliebiger Form greifen.

Hand-E Adaptiver Robotergreifer
Der beliebte Hand-E Greifer wurde soeben noch besser! Die Formgebung bleibt wie sie ist aber die internen Komponenten wurden erneuert. Das Ergebnis? Ein stärkerer Hand-E, höhere Nutzlast und eine bessere Garantie.
- Der Greifer für kollaborative Roboter
- Plug & Play und leicht zu programmieren
- Hohe Genauigkeit und großer Hub
- Ideal für Präzisionsmontageaufgaben
- Entwickelt für industrielle Anwendungen und raue Produktionsbedingungen

Vakuumgreifer
- Plug + Play
- Einfache Programmierung
- Schnelle Installation
- Volle Anpassung
- Wenig Lärm
- Effiziente und einfache Automatisierung
- Schnelle Reaktionszeit
Wahrnehmung und Vision
Finishing Copilot
- Kein stundenlanges Programmieren mehr
- Endbearbeitungspfade in wenigen Minuten generieren
- Externen Werkzeugverschleiß ausgleichen
- Externen Werkzeugmittelpunkt einstellen
- Mit jedem Kenntnisstand arbeiten

Force Copilot
- Komplexe Aufgaben einfach programmieren.
- Kraftsensitive Anwendungen freigeben.
- Robustheit und Flexibilität der Roboterzelle steigern.
- Das ganze Potenzial Ihres Kraft-Drehmomentsensors ausschöpfen.
- Kraftsteuerung im Handumdrehen meistern.

Kraft-Momenten-Sensor FT 300-S
- NEU: IP65 schutzklasse
- Komplexe Aufgaben einfach programmieren
- Kraftsensitive Anwendungen freigeben
- Robustheit und Flexibilität der Roboterzelle steigern
- Kraftsteuerung im Handumdrehen meistern

Handgelenkkamera
- Einfachste Hardware und Software zur Bildverarbeitung, entwickelt für Universal Robots
- Lokalisierung verschiedener Teile in einer strukturierten oder unstrukturierten Umgebung
- Schnelle Anpassung an Arbeitsebenen- und Werkzeugwechsel
- Erstellen Sie eine CAD-Modelldatei für jedes beliebige Teil
- Lesen von Barcodes und 2D-Codes
- Plug&Play-Verbindung, speziell entwickelt für Universal Robots
Anwendungen Kit

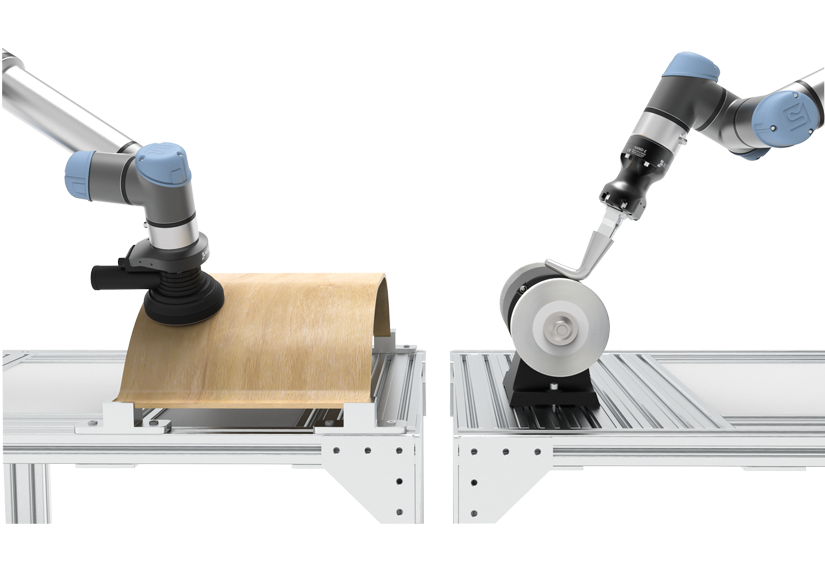
Schleifkit
- Von stundenlanger Programmierarbeit herunter auf wenige Minuten
- Schleifaufgaben auf einfache Weise automatisieren
- Die einzige Hardware- und Software-Schleiflösung für UR
- Mehr Qualität und Produktivität
- Weniger Arbeitsunfälle
Produktionsüberwachung

Insights
Insights sendet Ihnen eine Textnachricht, wenn Ihr Roboter Ihre Aufmerksamkeit benötigt, und schickt Ihnen Daten in Echtzeit, damit Sie Ihre Produktion überwachen, entstören und optimieren können. Es ist derzeit in den Vereinigten Staaten, in Kanada und in Europa erhältlich.
Lösungen
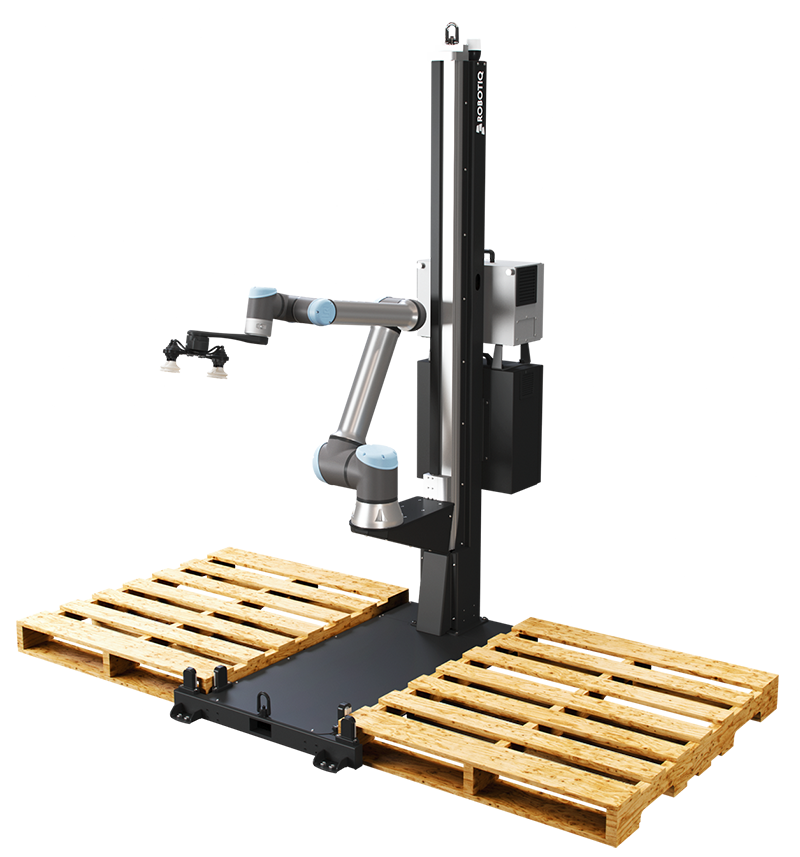
Palettierlösung
Steigern Sie Ihre Belegschaft! Robotiq bietet eine integrierte Lösung für das Risiko von Arbeitskräftemangel und Verletzungen aufgrund langweiliger und sich wiederholender Palettieraufgaben.
Schraublösung
Steigern Sie Ihre Belegschaft. Setzen Sie in zwei Wochen eine Roboter-Schraubzelle ein und setzen Sie Mitarbeiter für höherwertige Aufgaben frei.
na

Oberflächen-Endbearbeitungskit
- Automatisieren Sie eine der härtesten und schmutzigsten Arbeiten.
- Kein stundenlanges Programmieren mehr
- Mehr Qualität und Produktivität
- Verbinden Sie sich mit den weltweit führenden Endbearbeitungswerkzeugen.




Was wollen Sie heute automatisieren?
Kontakt zu einem expertenSchließen Sie sich unserer Online-Experten-Community an
Stellen Sie der Community eine Frage




