- Página de inicio
- Productos
Productos
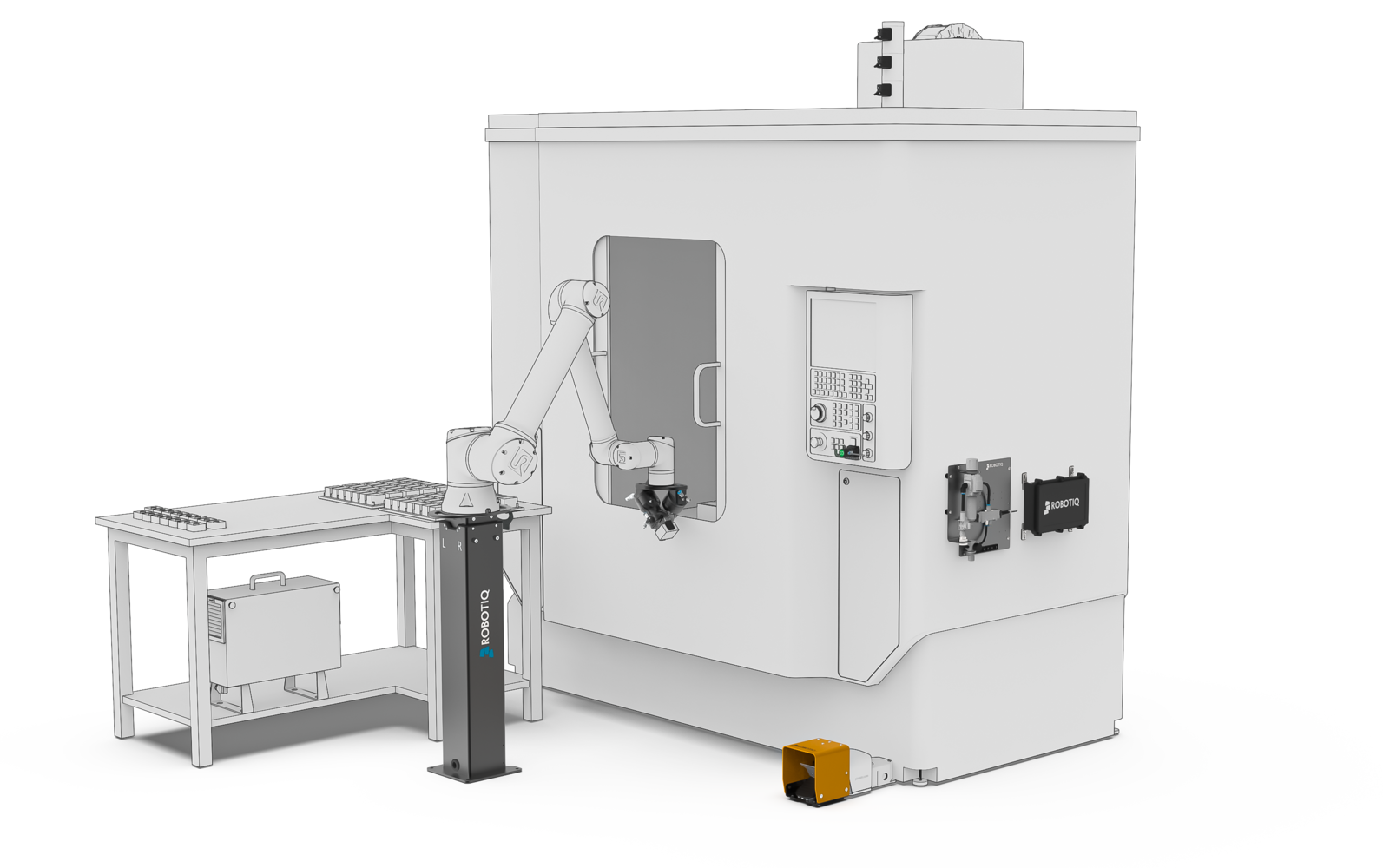
Solución de Supervisión de máquinas
Solución de Supervisión de máquinas
Pinzas

Pinzas 2F-85 y 2F-140
- Plug + Play en robots colaborativos
- Elimine los cambios y reduzca los costos de herramientas
- Escoja piezas de diferentes tamaños y formas
- Automatice todas sus aplicaciones con una sola pinza
- Programe su aplicación en minutos

Pinza robótica adaptable de 3 dedos
La pinza de 3 dedos es la mejor opción para una máxima versatilidad y flexibilidad. Recoge cualquier objeto de cualquier forma.

Pinza adaptable Hand-E
¡Tu pinza favorita es ahora aun mejor! Mantuvimos el factor de forma y mejoramos los componentes internos. ¿Resultado? Una Hand-E más fuerte, mayor carga útil y una mejor garantía.
- La pinza de los robots colaborativos
- Lista para usar y fácil de programar
- Trazo amplio y alta precisión
- Ideal para tareas de ensamblaje de precisión
- Creada para aplicaciones industriales y entornos hostile

Grippers de Vacío
● Plug + Play
● Fácil de programar
● Instalación rápida
● Personalización completa
● Poco ruido
● Automatización fácil y eficiente
● Tiempo de respuesta rápido
● Poco ruido
● Automatización fácil y eficiente
● Tiempo de respuesta rápido
Sensibilidad y visión
Finishing Copilot
- Ahorre horas de programación
- Genere trayectorias de acabado en minutos
- Compense el desgaste de las herramientas externas
- Establezca un punto central de herramientas externas Trabaje con cualquier nivel de experiencia

Force Copilot
- Programe tareas complejas de manera fácil.
- Desbloquee aplicaciones de sensibilidad de fuerza.
- Incremente la solidez y flexibilidad de la célula robótica.
- Desate todo el potencial de su sensor de torque y fuerza.
- Domine el control de fuerza en un instante.

Sensor de torque y fuerza FT 300-S
- NUEVO: IP65 clasificación
- Programe tareas complejas de manera fácil
- Desbloquee aplicaciones de sensibilidad de fuerza
- Incremente la solidez y flexibilidad de la célula robótica
- Domine el control de fuerza en un instante

Cámara
- Los hardware y software de visión más sencillos hechos para Universal Robots
- Localizan distintas piezas en entornos estructurados o no estructurados
- Se adaptan rápidamente a cambios de tareas y planos de trabajo
- Cree un modelo visual basado en el archivo CAD de cualquier pieza.
- Lectura de códigos en 2D y códigos de barras
- Conexión Plug + Play, diseñada para Universal Robots.
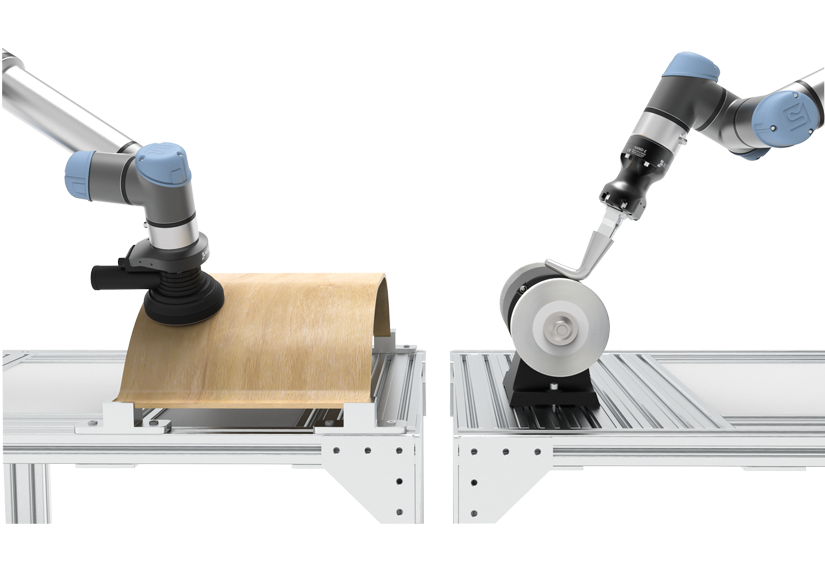
Kit de aplicaciones

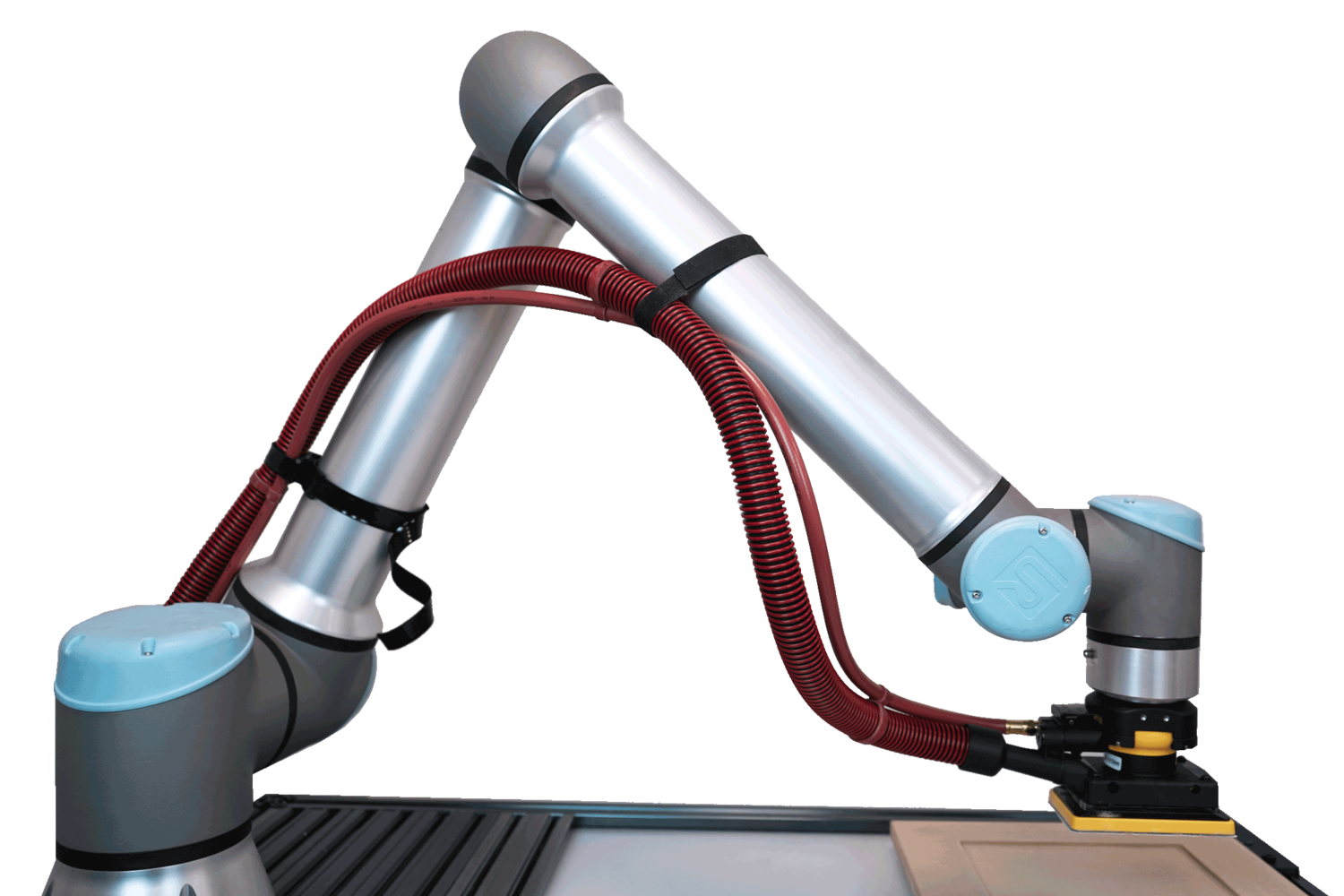
Kit de lijado
- Pase de horas de programación a tan solo minutos
- Automatice las tareas de lijado de manera fácil
- La única solución de hardware y software en lijado para UR.
- Aumente la calidad y la productividad
- Reduzca el número de lesiones en los empleados
Monitoreo de producción

Insights
Insights le envía un mensaje de texto cuando su robot requiere su atención, y proporciona datos en tiempo real para supervisar, solucionar problemas y mejorar su producción. Actualmente está disponible en los Estados Unidos, Canadá y Europa.
Soluciones
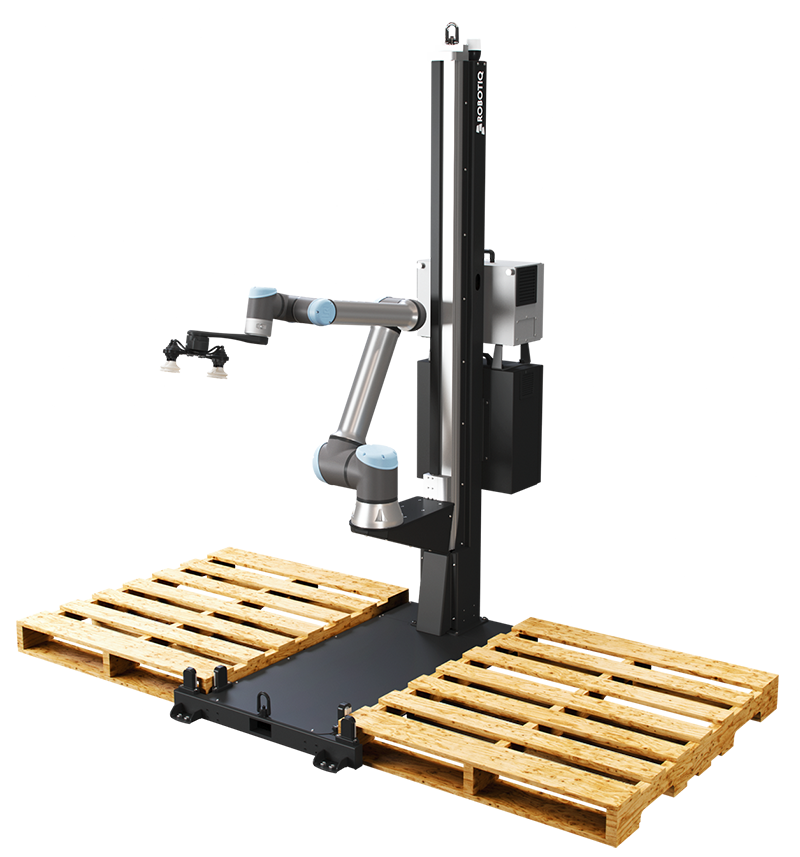
Solución de paletizado
¡Eleve su fuerza de trabajo! Robotiq proporciona una solución integrada al riesgo de escasez de mano de obra y lesiones debido a tareas de paletización aburridas y repetitivas.
Solución de atornillado
Eleve su fuerza de trabajo. Implemente una celda de atornillado robótico en dos semanas y libere empleados para tareas de mayor valor.
na

Equipo de acabado de superficie
- Automatice uno de los trabajos más difíciles y sucios.
- Ahorre horas de programación
- Aumente la calidad y la productividad
- Conéctese con las herramientas de acabado líderes del mundo.




¿Qué desea automatizar hoy?
Habla con un expertoEche un vistazo a las discusiones recientes para tener una idea de lo que está sucediendo ahora.
Descubra DoF




