
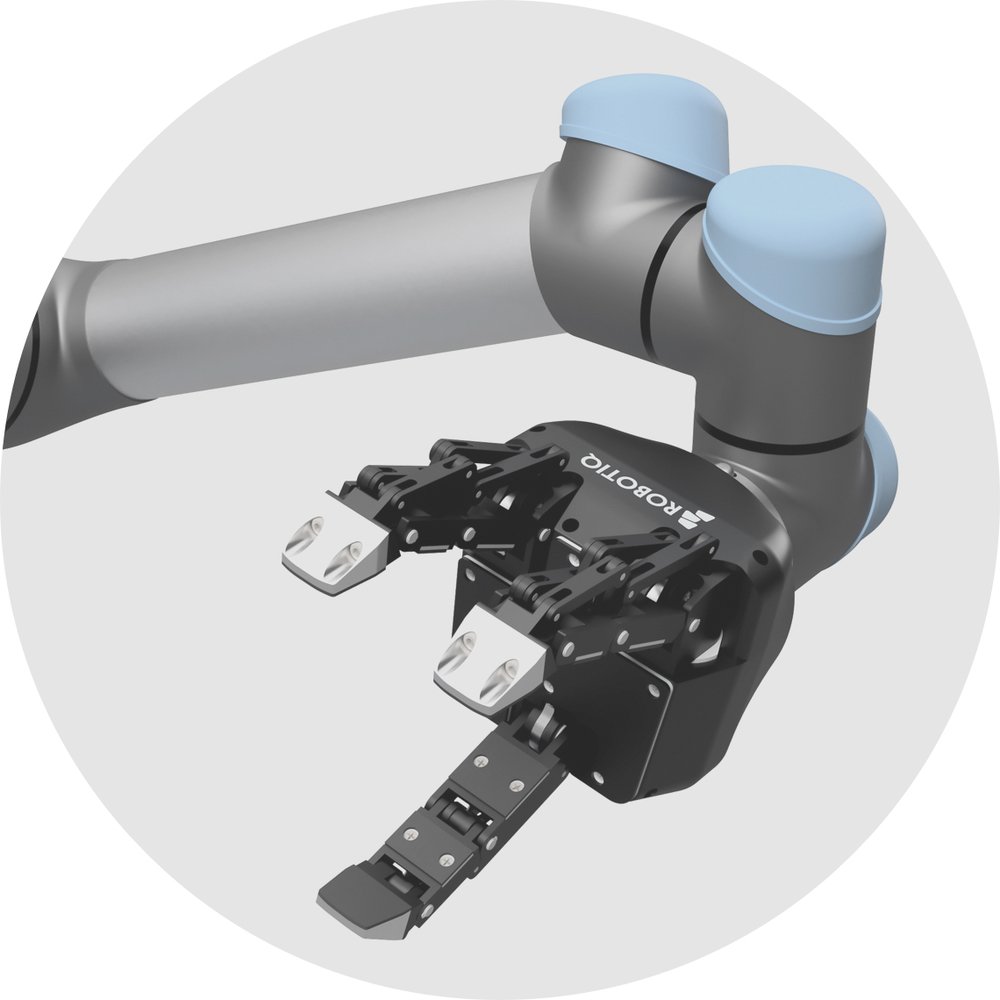
Main adaptative à 3 doigts
La main à 3 doigts est synonyme de polyvalence et d’adaptabilité. Elle saisit n’importe quel objet de n’importe quelle forme.
Applications
Caractéristiques
Spécifications
Marques de cobots
Applications
La main adaptative à 3 doigts est idéale pour la fabrication avancée et la recherche en robotique. Elle s’adapte à la forme de l’objet et garantit une prise ferme; vous pouvez ainsi vous concentrer sur la tâche et non sur la prise.

Contrôle de la qualité

Chargement et déchargement de machines

Assemblage

Transfert d’objets
Caractéristiques de la main
4 types de prise
Mode « Pincement » (Pinch)
Mode « Large » (Wide)
Mode « Ciseaux » (Scissor)
Mode « Basique » (Basic)
Mode « Ciseaux » (Scissor)
Mode « Basique » (Basic)
Contrôlez les doigts séparément
Obtenez les réactions de chaque doigt
Plug + Play
Installez et programmez votre robot en quelques minutes avec notre logiciel URCap pour main robotisée.
Télécharger la fiche produit
Télécharger la fiche produit

Facile à intégrer, facile à utiliser
La main adaptative à 3 doigts est parfaitement adaptée à UR. Son installation sur un bras Universal Robots ne prend que quelques minutes, et le logiciel UR+ permet sa configuration et sa programmation de manière rapide et intuitive.
La main à 3 doigts est compatible avec les produits de la plupart des fabricants de robots industriels. Nous offrons différentes options de matériel et de communication permettant d’installer la main sur la plupart des robots industriels.
Téléchargez notre nouvel URCap conçu pour la main adaptative à trois doigts.
Une main polyvalente
Grâce au contrôle de force, de position et de vitesse pour chaque doigt et 4 modes de préhension différents, la main à 3 doigts peut saisir une immense variété d’objets.
Inspirez-vous de ces exemples de projets innovants utilisant nos mains et nos capteurs : commande à distance, collaboration humain-robot, robotique mobile, dévracage, montage de produits et assemblage avancé.
Spécifications
|
3 doigts
|
||
| Ouverture de la main | 0 à 155 mm | 0 à 6,1 po |
| Masse de la main | 2,3 kg | 5 lb |
| Diamètre d’objet pour prise enveloppante | 20 à 155 mm | 0,79 à 6,10 po |
| Charge utile maximale recommandée (prise enveloppante) | 10 kg | 22 lb |
| Charge utile maximale recommandée (prise du bout des doigts) | 2,5 kg | 5,5 lb |
| Force de préhension (prise du bout des doigts) | 30 à 70 N | 6,74 à 15,74 lbf |
Ouverture de la main
3 doigts:
0 à 155 mm
0 à 6,1 po
Masse de la main
3 doigts:
2,3 kg
5 lb
Diamètre d’objet pour prise enveloppante
3 doigts:
20 à 155 mm
0,79 à 6,10 po
Charge utile maximale recommandée (prise enveloppante)
3 doigts:
10 kg
22 lb
Charge utile maximale recommandée (prise du bout des doigts)
3 doigts:
2,5 kg
5,5 lb
Force de préhension (prise du bout des doigts)
3 doigts:
30 à 70 N
6,74 à 15,74 lbf
Marques de Cobots







