The Wrist Camera on Universal Robots UR5 and its programming interface on the Polyscope teach pendant

In this picture: 2-Finger 85, Wrist Camera - Photos
In this picture: 2-Finger 85, Wrist Camera - Photos

In this picture: 2-Finger 140, Wrist Camera - Photos
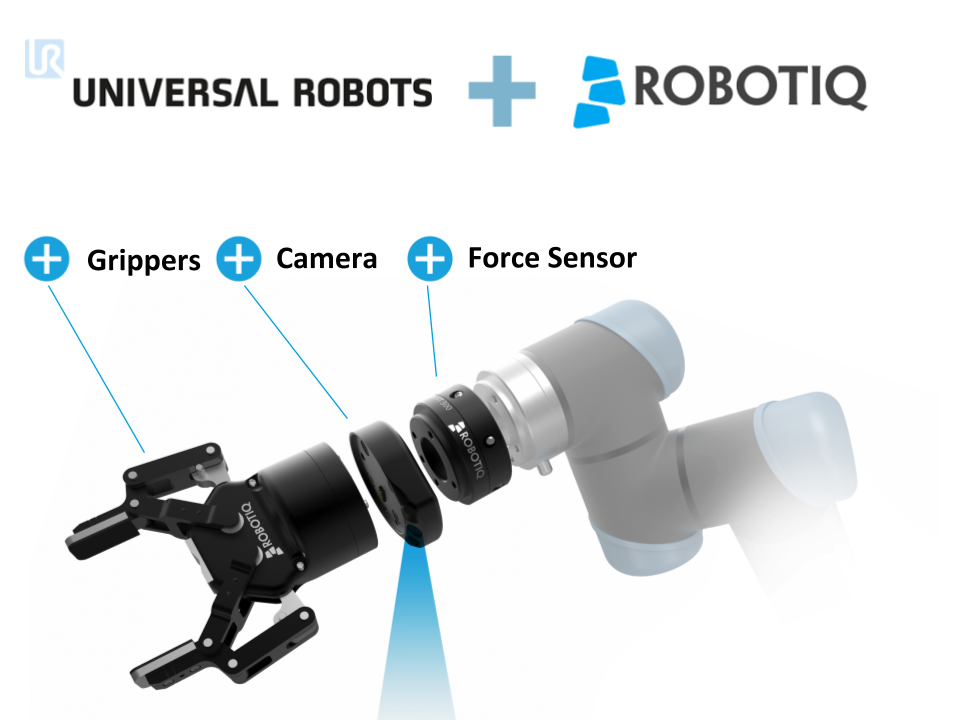
In this picture: 2-Finger 85, Wrist Camera, FT 300 - Photos

In this picture: 2-Finger 85, Wrist Camera, FT 300 - Photos

In this picture: 2-Finger 85, Wrist Camera, FT 300 - Photos

In this picture: 2-Finger 85, Wrist Camera, FT 300 - Photos

In this picture: 2-Finger 140, Wrist Camera - Photos

In this picture: 2-Finger 85, Wrist Camera, FT 300 - Photos

WALT Machine Case study produced by Robotiq and showing 2-Finger Adaptive Robot Gripper and the Wrist Camera - Photos

WALT Machine Case study produced by Robotiq and showing 2-Finger Adaptive Robot Gripper and the Wrist Camera - Photos





