Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...


SCHLEIFSATZ
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day


Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...

Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...

Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...

Automation rarely starts with a full factory transformation. More often, it begins with a single...
Artificial intelligence has dramatically improved how robots perceive the world. Computer vision...

Coffee production is growing worldwide. From roasted beans to capsules and pods, manufacturers are...

Artificial intelligence is moving fast. Large language models can write emails, summarize reports,...
Artificial intelligence is transforming robotics. Vision systems can identify objects, machine...

Across many manufacturing facilities, one role remains surprisingly difficult to fill: palletizing....
.jpg)
At the end of the production line, everything comes together. Boxes are sealed, labeled, and ready...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day

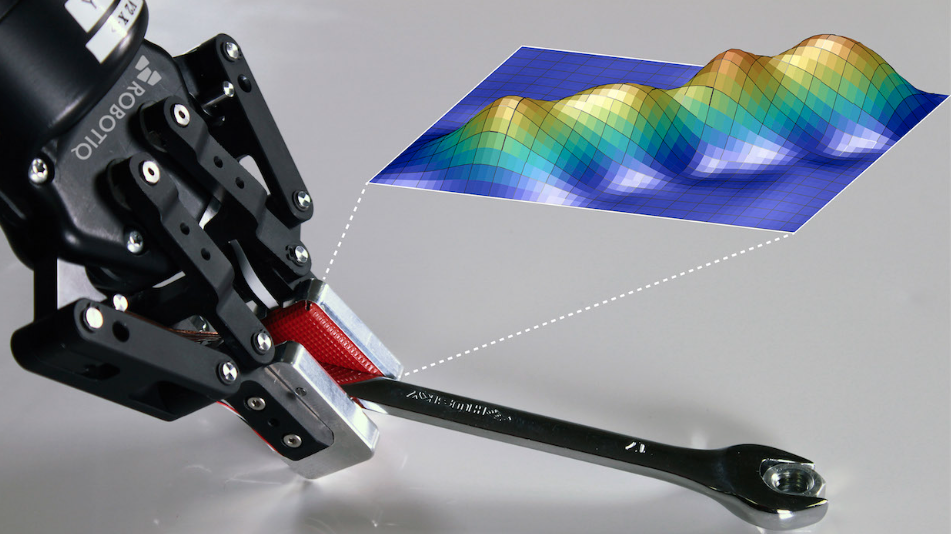
Das Robotiq Sanding Kit verbessert die Oberflächenbearbeitung durch sein anpassungsfähiges Design und seine nahtlose Integration. Mit seiner benutzerfreundlichen Oberfläche erleichtert es Anwendern mit unterschiedlichem Know-how die unkomplizierte Einrichtung. Das Kit gewährleistet durch seine anpassungsfähige Nachgiebigkeit und die fortschrittliche Bewegungssteuerung ein gleichmäßiges Schleifen, was für eine gleichbleibende Qualität der Oberflächen entscheidend ist.



Robotiq has a variety of technical information available for your solution.
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Automation rarely starts with a full factory transformation. More often, it begins with a single...
Artificial intelligence has dramatically improved how robots perceive the world. Computer vision...
Coffee production is growing worldwide. From roasted beans to capsules and pods, manufacturers are...
Artificial intelligence is moving fast. Large language models can write emails, summarize reports,...
Artificial intelligence is transforming robotics. Vision systems can identify objects, machine...
Across many manufacturing facilities, one role remains surprisingly difficult to fill: palletizing....
At the end of the production line, everything comes together. Boxes are sealed, labeled, and ready...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Automation rarely starts with a full factory transformation. More often, it begins with a single...
Artificial intelligence has dramatically improved how robots perceive the world. Computer vision...
Coffee production is growing worldwide. From roasted beans to capsules and pods, manufacturers are...
Artificial intelligence is moving fast. Large language models can write emails, summarize reports,...
Artificial intelligence is transforming robotics. Vision systems can identify objects, machine...
Across many manufacturing facilities, one role remains surprisingly difficult to fill: palletizing....
At the end of the production line, everything comes together. Boxes are sealed, labeled, and ready...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Automation rarely starts with a full factory transformation. More often, it begins with a single...
Artificial intelligence has dramatically improved how robots perceive the world. Computer vision...
Coffee production is growing worldwide. From roasted beans to capsules and pods, manufacturers are...
Artificial intelligence is moving fast. Large language models can write emails, summarize reports,...
Artificial intelligence is transforming robotics. Vision systems can identify objects, machine...
Across many manufacturing facilities, one role remains surprisingly difficult to fill: palletizing....
At the end of the production line, everything comes together. Boxes are sealed, labeled, and ready...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Automation rarely starts with a full factory transformation. More often, it begins with a single...
Artificial intelligence has dramatically improved how robots perceive the world. Computer vision...
Coffee production is growing worldwide. From roasted beans to capsules and pods, manufacturers are...
Artificial intelligence is moving fast. Large language models can write emails, summarize reports,...
Artificial intelligence is transforming robotics. Vision systems can identify objects, machine...
Across many manufacturing facilities, one role remains surprisingly difficult to fill: palletizing....
At the end of the production line, everything comes together. Boxes are sealed, labeled, and ready...
| Maximale Luftzufuhr | 6,2 bar (90 PSI) |
|---|---|
| Luftstrom (volle Geschwindigkeit) | 450 l/min |
| Durchmesser des Pads | 127 mm (5 in.) |
| Medien | Klettverschluss; 5 Löcher |
| Durchmesser der Umlaufbahn | 4,8 mm (3/16 Zoll) |
| Maximale Geschwindigkeit | 12.000 UMDREHUNGEN PRO MINUTE |
| Lufteinlass | 1/4-Zoll-NPT-Gewinde |
| Staubabsaugung | Zentralstaubsauger geeignet; 25 mm (1 Zoll) Durchmesser |
| Gewicht des Werkzeugs | 0,42 kg (1 lb) |
| Zusätzliche Höhe | 9 mm (0,35 in.) |
| Kompatible Schleifmaschinen | Dynabrade 56854B, 56819B, 56830B, 56863B, 56844B, 57404B, 57814B |
| Grits | 60, 80, 120, 320, 400 |
-modified.png?width=350&height=350&name=fc7803907d3b0b85e9399396796ef3e5b22dd116072b1d30723ceed35be168db%20(1)-modified.png)







.png?width=257&height=171&name=Frame%2011%20(3).png)
