


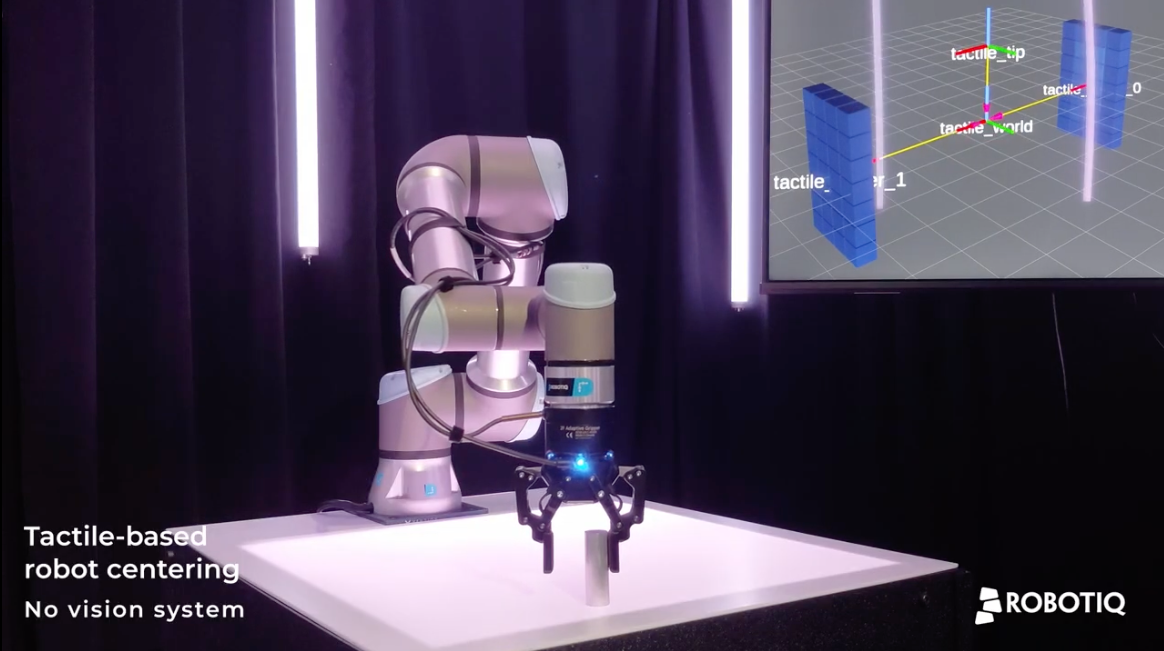
A robot does not always grip a part exactly where intended. Vision may guide the gripper close, but...
-1.jpg?width=2000&name=2F140-Wrist-Camera-Machine-Tending-Walt-Machine-12%20(2)-1.jpg)
Handgelenkkamera
INTEGRIERTE BELEUCHTUNG
FOKUS BEREICH
ANSICHTSFELD

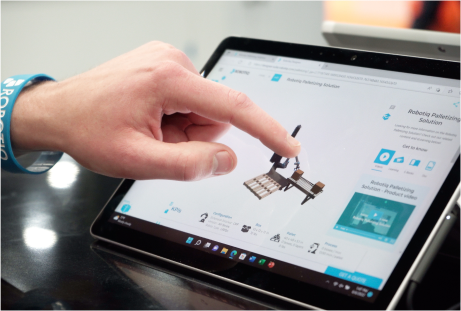
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
A robot does not always grip a part exactly where intended. Vision may guide the gripper close, but...

If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...

In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
.png)
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...

Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...

Most manufacturers who want to automate palletizing face the same problem. Getting a straight...

Palletizing automation is one of the clearest wins in end-of-line operations. The ROI is real, the...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day


Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
A robot does not always grip a part exactly where intended. Vision may guide the gripper close, but...
If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
Palletizing automation is one of the clearest wins in end-of-line operations. The ROI is real, the...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Vom sorgfältigen Design über die nahtlose Integration bis hin zum optimierten Betrieb ist die Robotiq-Handgelenkkamera der Schlüssel zur Erschließung fortschrittlicher Bildverarbeitungsfunktionen und zur Steigerung von Produktivität und Effizienz in unterschiedlichen Fertigungsumgebungen.



Robotiq has a variety of technical information available for your solution.
A robot does not always grip a part exactly where intended. Vision may guide the gripper close, but...
If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
Palletizing automation is one of the clearest wins in end-of-line operations. The ROI is real, the...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
A robot does not always grip a part exactly where intended. Vision may guide the gripper close, but...
If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
Palletizing automation is one of the clearest wins in end-of-line operations. The ROI is real, the...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Die Handgelenkkamera ist sehr flexibel und kann Teile in einem weiten Sichtfeld lokalisieren. Jedes Mal, wenn es ein neues Schloss zu montieren gibt, können wir ein neues Teil einlernen.

Mechanischer Entwicklungsingenieur, Assa Abloy
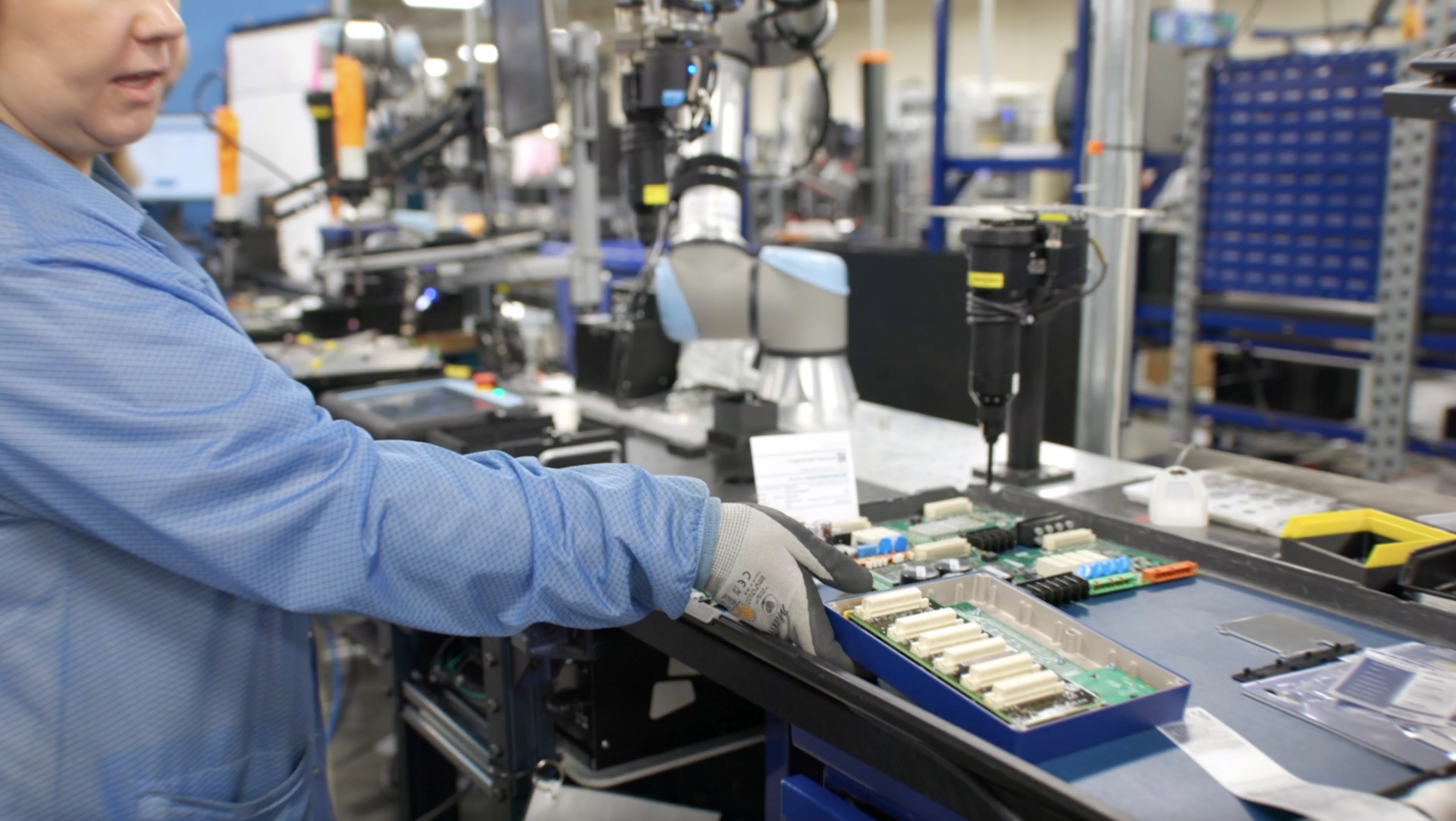
Diese Kamera löst das Problem, das jeder Hersteller auf der Welt hat, nämlich das Aufnehmen von Teilen, die sich nicht in derselben Position befinden.

Prozess- und Qualitätsmanager, Beyerdynamic
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
A robot does not always grip a part exactly where intended. Vision may guide the gripper close, but...
If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
Palletizing automation is one of the clearest wins in end-of-line operations. The ROI is real, the...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
A robot does not always grip a part exactly where intended. Vision may guide the gripper close, but...
If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
Palletizing automation is one of the clearest wins in end-of-line operations. The ROI is real, the...
| Gewicht | 0,16 kg (0,35 lb) |
|---|---|
| Abmessungen | 87,5 x 75 x 22,4 mm (3,4 x 3 x 0,9 in.) |
| Sensor und Optik | 5-Megapixel-Farbsensor, elektronischer Fokus |
| Minimales Sichtfeld | 10 x 7,5 cm (3,9 x 3 in.) |
| Maximales Sichtfeld* | 71 x 54 cm (28 x 21,3 in.) |
| Mindestteilgröße (% des Sichtfelds) | 10% |
| Maximale Teilgröße (% des Sichtfelds) | 60% |
| Integrierte Beleuchtung | 6-LEDs, diffuses weißes Licht |
| Fokusbereich | 7 mm bis ∞ |
| Kompatibilität | Universal-Roboter |
*Für UR16-Cobot. Werte können je nach Universal-Robot-Modell (UR3, UR5, UR10) variieren.









.png?width=257&height=171&name=Frame%2011%20(2).png)