


If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...

-1.jpg?width=2000&name=2F140-Wrist-Camera-Machine-Tending-Walt-Machine-12%20(2)-1.jpg)
Caméra de poignet
ÉCLAIRAGE INTÉGRÉ
MISE AU POINT
CHAMP DE VISION

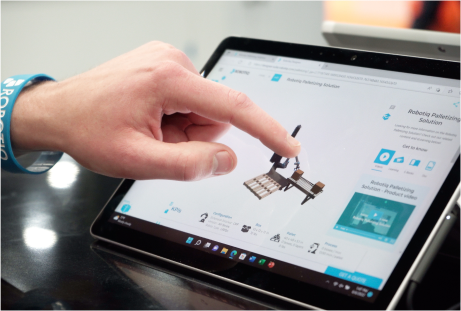
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...

In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
.png)
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...

Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...

Most manufacturers who want to automate palletizing face the same problem. Getting a straight...

Palletizing automation is one of the clearest wins in end-of-line operations. The ROI is real, the...

To reach the level of robustness the Physical AI community aspires to, namely generalist policies...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day


Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
Palletizing automation is one of the clearest wins in end-of-line operations. The ROI is real, the...
To reach the level of robustness the Physical AI community aspires to, namely generalist policies...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
D'une conception méticuleuse à une intégration parfaite et un fonctionnement optimisé, la caméra de poignet Robotiq est la clé pour débloquer des capacités de vision avancées, améliorant ainsi la productivité et l'efficacité dans divers environnements manufacturiers.



Robotiq has a variety of technical information available for your solution.
If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
Palletizing automation is one of the clearest wins in end-of-line operations. The ROI is real, the...
To reach the level of robustness the Physical AI community aspires to, namely generalist policies...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
Palletizing automation is one of the clearest wins in end-of-line operations. The ROI is real, the...
To reach the level of robustness the Physical AI community aspires to, namely generalist policies...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
La caméra de poignet est très flexible et peut localiser les pièces dans un large champ de vision. Chaque fois qu’il y a une nouvelle serrure à assembler, nous pouvons facilement programmer une nouvelle pièce.

Ingénieur mécanique, Assa Abloy
Cette caméra règle un problème auquel tous les fabricants sont confrontés : saisir des pièces qui sont présentées dans toutes sortes de positions.

Gestionnaire procédés et qualité, Beyerdynamic
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
Palletizing automation is one of the clearest wins in end-of-line operations. The ROI is real, the...
To reach the level of robustness the Physical AI community aspires to, namely generalist policies...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
Palletizing automation is one of the clearest wins in end-of-line operations. The ROI is real, the...
To reach the level of robustness the Physical AI community aspires to, namely generalist policies...
| Poids | 0,16 kg (0,35 lb) |
|---|---|
| Dimensions | 87,5 x 75 x 22,4 mm (3,4 x 3 x 0,9 po.) |
| Capteur et optique | Capteur couleur de 5 mégapixels, mise au point électronique |
| Champ de vision minimum | 10 x 7,5 cm (3,9 x 3 po) |
| Champ de vision maximum* | 71 x 54 cm (28 x 21,3 po) |
| Taille minimale de l'objet (% du champ de vision) | 10% |
| Taille maximale de l'objet (% du champ de vision) | 60% |
| Éclairage intégré | 6 DEL à lumière blanche diffuse |
| Plage de mise au point | 70 mm à ∞ |
| Compatibilité | Universal Robots |









.png?width=257&height=171&name=Frame%2011%20(2).png)