Coffee production is growing worldwide. From roasted beans to capsules and pods, manufacturers are...


KIT DE LIJADO
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day


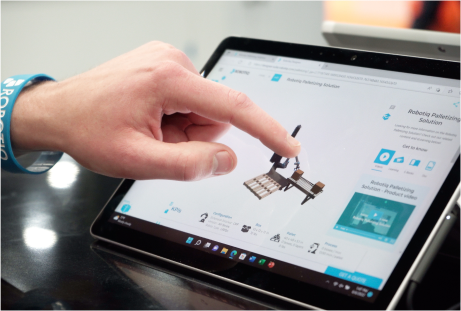
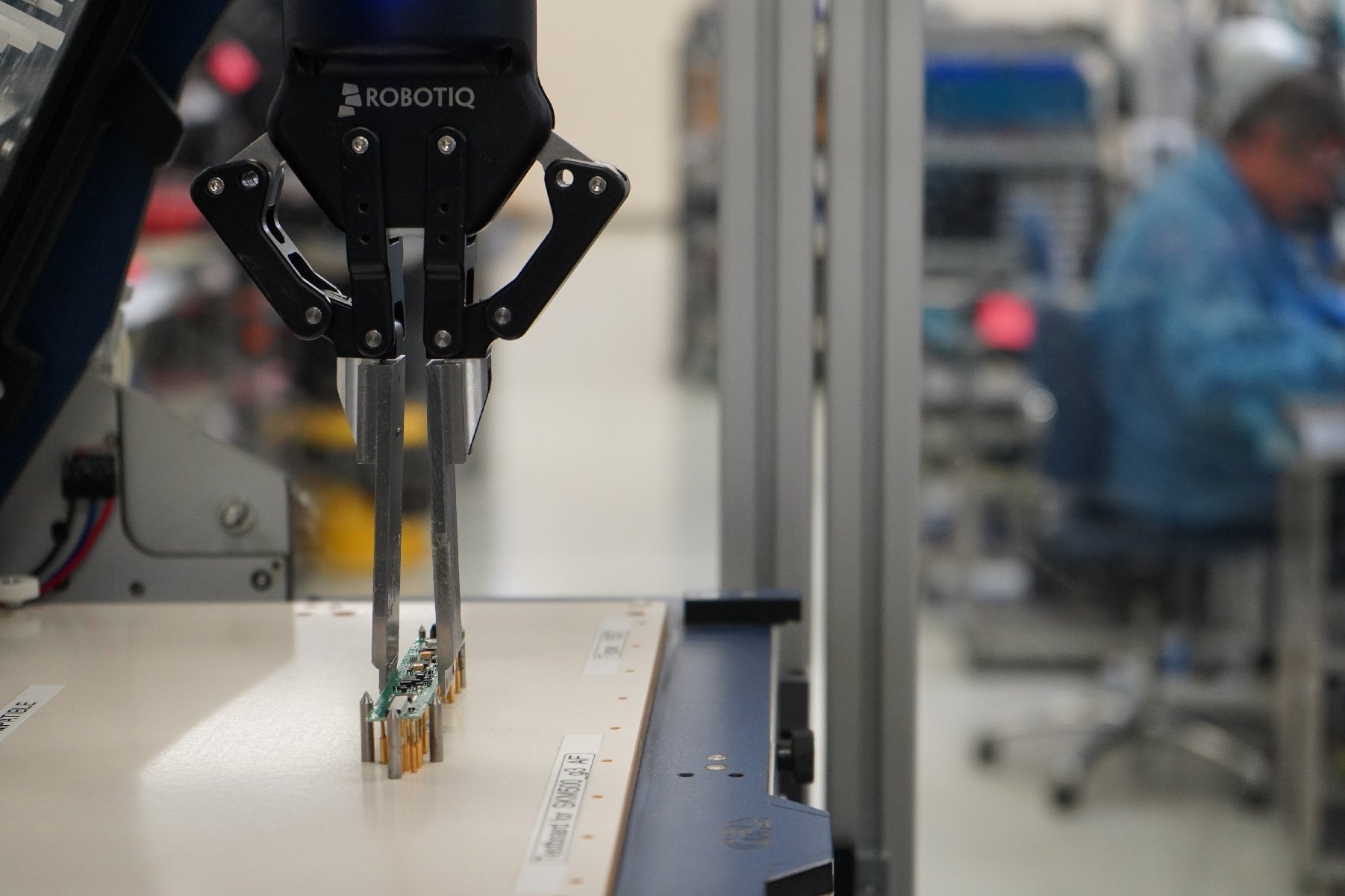
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Coffee production is growing worldwide. From roasted beans to capsules and pods, manufacturers are...

Artificial intelligence is moving fast. Large language models can write emails, summarize reports,...

Artificial intelligence is transforming robotics. Vision systems can identify objects, machine...

Across many manufacturing facilities, one role remains surprisingly difficult to fill: palletizing....
.jpg)
At the end of the production line, everything comes together. Boxes are sealed, labeled, and ready...

Increasing output by 50% without adding floor space sounds unrealistic for most manufacturers. That...

Industrial manufacturers often struggle with capacity, labor strain, and consistency. At Korea...
Artificial intelligence can generate actions. Physical AI hardware determines whether those actions...
At Sennheiser Manufacturing USA in Albuquerque, precision is non-negotiable. Every week, the...
Physical AI has moved past proof-of-concept. Large models, better simulation, and faster hardware...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day

El kit de lijado Robotiq mejora el acabado de superficies gracias a su diseño adaptable y a su perfecta integración. Con una interfaz fácil de usar, facilita una configuración sencilla para usuarios con distintos conocimientos. El kit garantiza un lijado uniforme gracias a su adaptabilidad y control de movimiento avanzado, que son fundamentales para obtener acabados de calidad uniforme.



Robotiq has a variety of technical information available for your solution.
Coffee production is growing worldwide. From roasted beans to capsules and pods, manufacturers are...
Artificial intelligence is moving fast. Large language models can write emails, summarize reports,...
Artificial intelligence is transforming robotics. Vision systems can identify objects, machine...
Across many manufacturing facilities, one role remains surprisingly difficult to fill: palletizing....
At the end of the production line, everything comes together. Boxes are sealed, labeled, and ready...
Increasing output by 50% without adding floor space sounds unrealistic for most manufacturers. That...
Industrial manufacturers often struggle with capacity, labor strain, and consistency. At Korea...
Artificial intelligence can generate actions. Physical AI hardware determines whether those actions...
At Sennheiser Manufacturing USA in Albuquerque, precision is non-negotiable. Every week, the...
Physical AI has moved past proof-of-concept. Large models, better simulation, and faster hardware...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Coffee production is growing worldwide. From roasted beans to capsules and pods, manufacturers are...
Artificial intelligence is moving fast. Large language models can write emails, summarize reports,...
Artificial intelligence is transforming robotics. Vision systems can identify objects, machine...
Across many manufacturing facilities, one role remains surprisingly difficult to fill: palletizing....
At the end of the production line, everything comes together. Boxes are sealed, labeled, and ready...
Increasing output by 50% without adding floor space sounds unrealistic for most manufacturers. That...
Industrial manufacturers often struggle with capacity, labor strain, and consistency. At Korea...
Artificial intelligence can generate actions. Physical AI hardware determines whether those actions...
At Sennheiser Manufacturing USA in Albuquerque, precision is non-negotiable. Every week, the...
Physical AI has moved past proof-of-concept. Large models, better simulation, and faster hardware...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Coffee production is growing worldwide. From roasted beans to capsules and pods, manufacturers are...
Artificial intelligence is moving fast. Large language models can write emails, summarize reports,...
Artificial intelligence is transforming robotics. Vision systems can identify objects, machine...
Across many manufacturing facilities, one role remains surprisingly difficult to fill: palletizing....
At the end of the production line, everything comes together. Boxes are sealed, labeled, and ready...
Increasing output by 50% without adding floor space sounds unrealistic for most manufacturers. That...
Industrial manufacturers often struggle with capacity, labor strain, and consistency. At Korea...
Artificial intelligence can generate actions. Physical AI hardware determines whether those actions...
At Sennheiser Manufacturing USA in Albuquerque, precision is non-negotiable. Every week, the...
Physical AI has moved past proof-of-concept. Large models, better simulation, and faster hardware...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Coffee production is growing worldwide. From roasted beans to capsules and pods, manufacturers are...
Artificial intelligence is moving fast. Large language models can write emails, summarize reports,...
Artificial intelligence is transforming robotics. Vision systems can identify objects, machine...
Across many manufacturing facilities, one role remains surprisingly difficult to fill: palletizing....
At the end of the production line, everything comes together. Boxes are sealed, labeled, and ready...
Increasing output by 50% without adding floor space sounds unrealistic for most manufacturers. That...
Industrial manufacturers often struggle with capacity, labor strain, and consistency. At Korea...
Artificial intelligence can generate actions. Physical AI hardware determines whether those actions...
At Sennheiser Manufacturing USA in Albuquerque, precision is non-negotiable. Every week, the...
Physical AI has moved past proof-of-concept. Large models, better simulation, and faster hardware...
| Suministro máximo de aire | 6,2 bar (90 PSI) |
|---|---|
| Caudal de aire (velocidad máxima) | 450 l/min |
| Diámetro de la almohadilla | 127 mm (5 pulg.) |
| Medios de comunicación | Gancho y bucle; 5 agujeros |
| Diámetro de la órbita | 4,8 mm (3/16 pulg.) |
| Velocidad máxima | 12.000 RPM |
| Entrada de aire | Rosca NPT de 1/4 pulgada |
| Escape de polvo | Preparado para aspiración centralizada; diámetro de 25 mm (1 pulg.) |
| Peso de las herramientas | 0,42 kg (1 lb) |
| Altura añadida | 9 mm (0,35 pulg.) |
| Lijadoras compatibles | Dynabrade 56854B, 56819B, 56830B, 56863B, 56844B, 57404B, 57814B |
| Sémola | 60, 80, 120, 320, 400 |
-modified.png?width=350&height=350&name=fc7803907d3b0b85e9399396796ef3e5b22dd116072b1d30723ceed35be168db%20(1)-modified.png)







.png?width=257&height=171&name=Frame%2011%20(3).png)
