




Part 1 of 2, Physical AI: The DARPA Legacy & the Road Ahead. What the DARPA Robotics Challenge...


SENSOR DE FUERZA PAR
CLASIFICACIÓN IP
RANGO DE MEDIDA
CAPACIDAD DE SOBRECARGA

Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Part 1 of 2, Physical AI: The DARPA Legacy & the Road Ahead. What the DARPA Robotics Challenge...
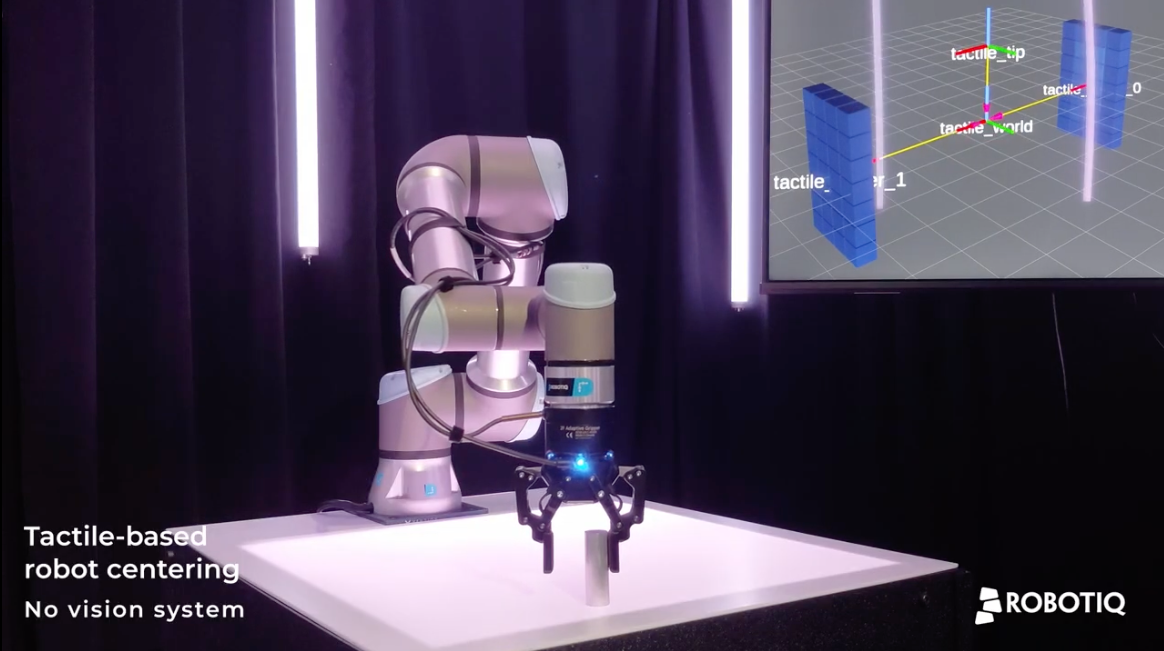
A robot does not always grip a part exactly where intended. Vision may guide the gripper close, but...

If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...

In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
.png)
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...

Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...

Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day


Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Part 1 of 2, Physical AI: The DARPA Legacy & the Road Ahead. What the DARPA Robotics Challenge...
A robot does not always grip a part exactly where intended. Vision may guide the gripper close, but...
If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
El sensor de par de fuerza FT 300-S realiza mediciones precisas, repetibles y de alta resolución. Esta herramienta de conectar y usar aumenta las capacidades de la célula cobot, aportando destreza, flexibilidad y fiabilidad, en aplicaciones de ensamblaje, inserción, recoger y colocar, acabado, pruebas de calidad y mantenimiento de máquinas.


Robotiq has a variety of technical information available for your solution.
Part 1 of 2, Physical AI: The DARPA Legacy & the Road Ahead. What the DARPA Robotics Challenge...
A robot does not always grip a part exactly where intended. Vision may guide the gripper close, but...
If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Part 1 of 2, Physical AI: The DARPA Legacy & the Road Ahead. What the DARPA Robotics Challenge...
A robot does not always grip a part exactly where intended. Vision may guide the gripper close, but...
If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Part 1 of 2, Physical AI: The DARPA Legacy & the Road Ahead. What the DARPA Robotics Challenge...
A robot does not always grip a part exactly where intended. Vision may guide the gripper close, but...
If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Part 1 of 2, Physical AI: The DARPA Legacy & the Road Ahead. What the DARPA Robotics Challenge...
A robot does not always grip a part exactly where intended. Vision may guide the gripper close, but...
If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
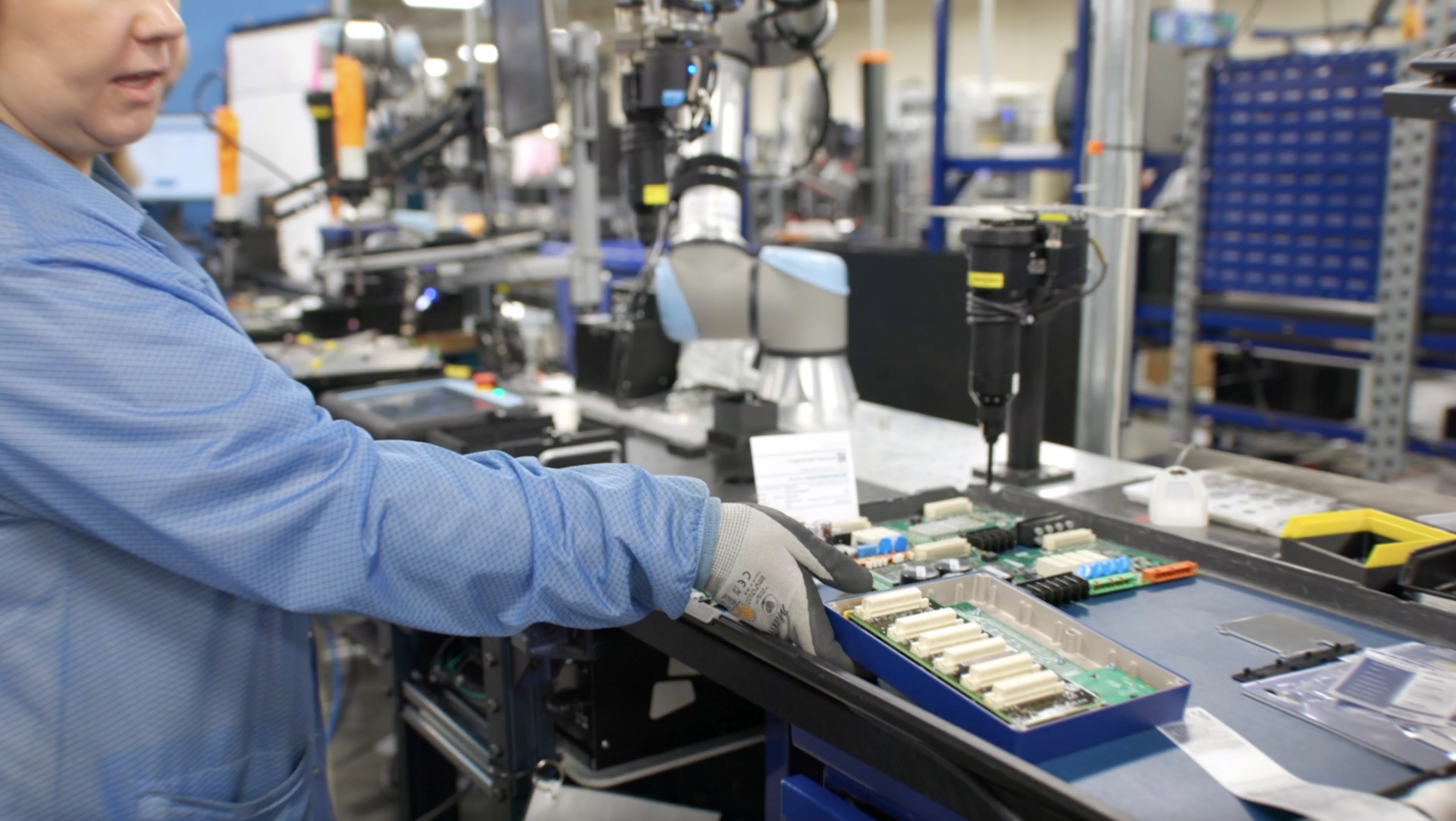
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
| Peso de las herramientas | 0,44 kg (1 lb) |
|---|---|
| Rango de medición | 300 N (FX, FY, FZ) / ± 30 Nm (MX, MY, MZ) |
| Capacidad de sobrecarga | 500% |
| Sensibilidad al ruido externo | Inmune |
| Velocidad de salida de datos | 100 Hz |
| Grado de protección contra la penetración (IP) | IP65 |
| Temperatura de funcionamiento | 15 a 35°C (59 a 95 °F) |
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
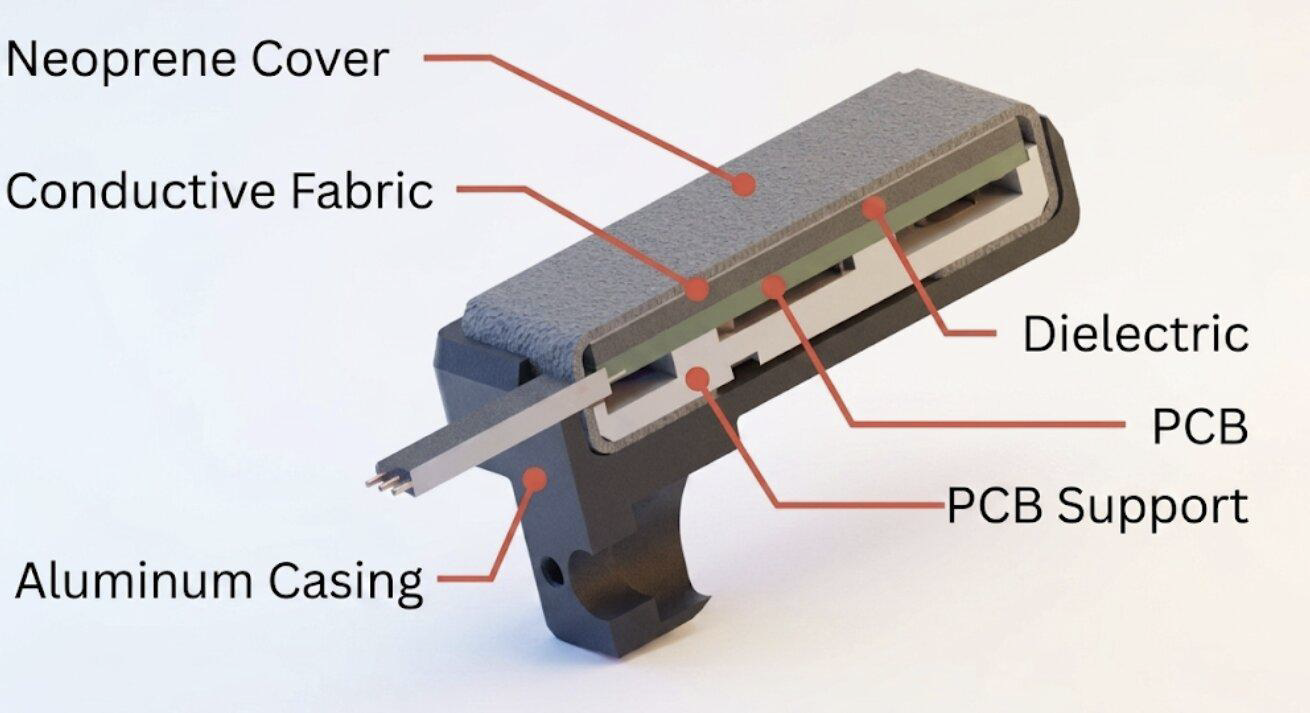
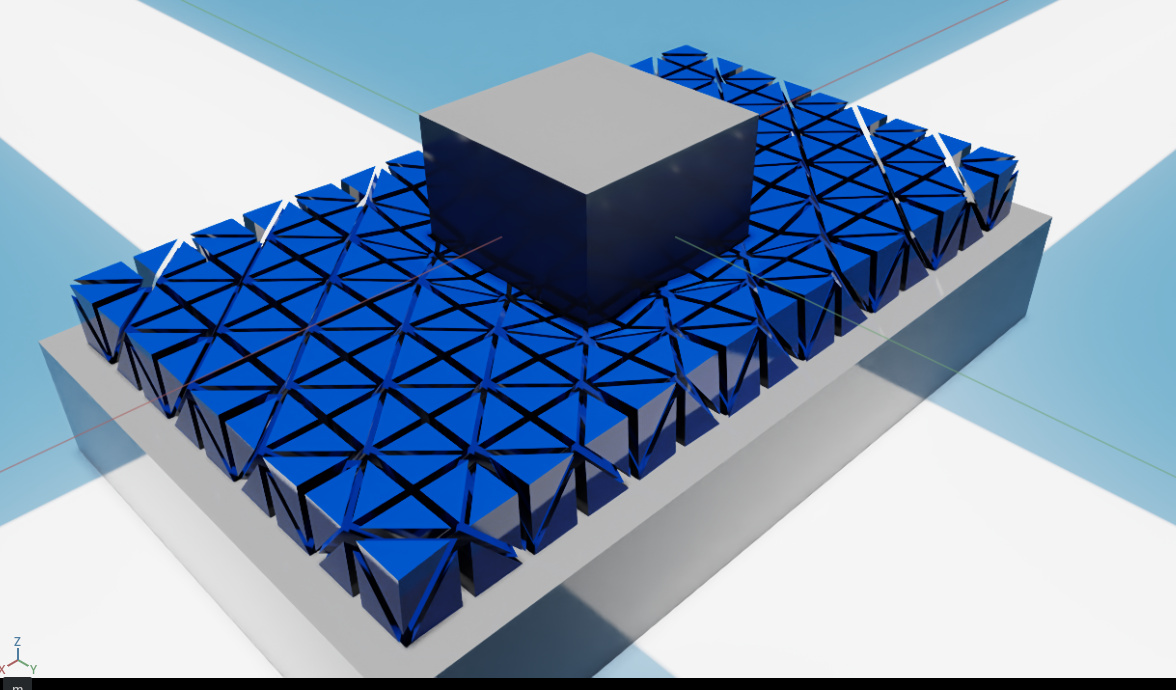
El FT-300-S es un sensor de fuerza-par de 6 GDL (grados de libertad) que proporciona a los sistemas de IA Física una percepción de contacto precisa y de alta resolución para una manipulación adaptable y rica en interacciones.
Al detectar y medir con precisión las fuerzas de interacción, permite que los robots regulen el contacto, se adapten a la variabilidad y se recuperen de la incertidumbre en tareas del mundo real, reduciendo el esfuerzo de ajuste, simplificando la programación y acelerando la transición de la simulación a una implementación confiable.
Detección de fuerza-par en 6 GDL para IA Física y manipulación con contacto intensivo
Datos de fuerza de alta resolución y bajo ruido para control adaptable y aprendizaje
Tecnología sin contacto para señales estables sin desgaste ni envejecimiento
Baja latencia y despliegue simplificado para flujos de trabajo de IA
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Part 1 of 2, Physical AI: The DARPA Legacy & the Road Ahead. What the DARPA Robotics Challenge...
A robot does not always grip a part exactly where intended. Vision may guide the gripper close, but...
If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
See how the 2-Finger Adaptive Robot Gripper helped triple Voodoo Manufacturing's 3D printing production
The ROI was a slam dunk from the beginning, from how much labor it saved. The installation process was the smoothest install of any piece of equipment I have had to experience in 28 years.
Vice-President, Cascade
coffee

Norem ipsum dolor sit amet, consectetur adipiscing elit. Etiam eu turpis molestie, dictum est a, mattis tellus. Sed dignissim, metus nec fringilla accumsan, risus sem sollicitudin lacus, ut interdum tellus elit sed risus. Maecenas eget condimentum velit, sit amet feugiat lectus.
Class aptent taciti sociosqu ad litora torquent per conubia nostra, per inceptos himenaeos. Praesent auctor purus luctus enim egestas, ac scelerisque ante pulvinar.
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
|---|---|---|---|
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |









.png?width=257&height=171&name=Frame%2011%20(3).png)
