




In the heart of Provence, a small French bottling company is proving that automation isn't just for...


SENSORE DI FORZA E COPPIA
VALUTAZIONE IP
INTERVALLO DI MISURA
CAPACITÀ DI SOVRACCARICO

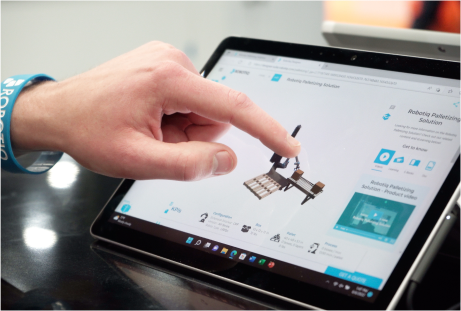
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
.png)
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...

Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...

Most manufacturers who want to automate palletizing face the same problem. Getting a straight...

Palletizing automation is one of the clearest wins in end-of-line operations. The ROI is real, the...

To reach the level of robustness the Physical AI community aspires to, namely generalist policies...
Vision-language-action models are the current state of the art in robotic manipulation. They still...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day


Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
Palletizing automation is one of the clearest wins in end-of-line operations. The ROI is real, the...
To reach the level of robustness the Physical AI community aspires to, namely generalist policies...
Vision-language-action models are the current state of the art in robotic manipulation. They still...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
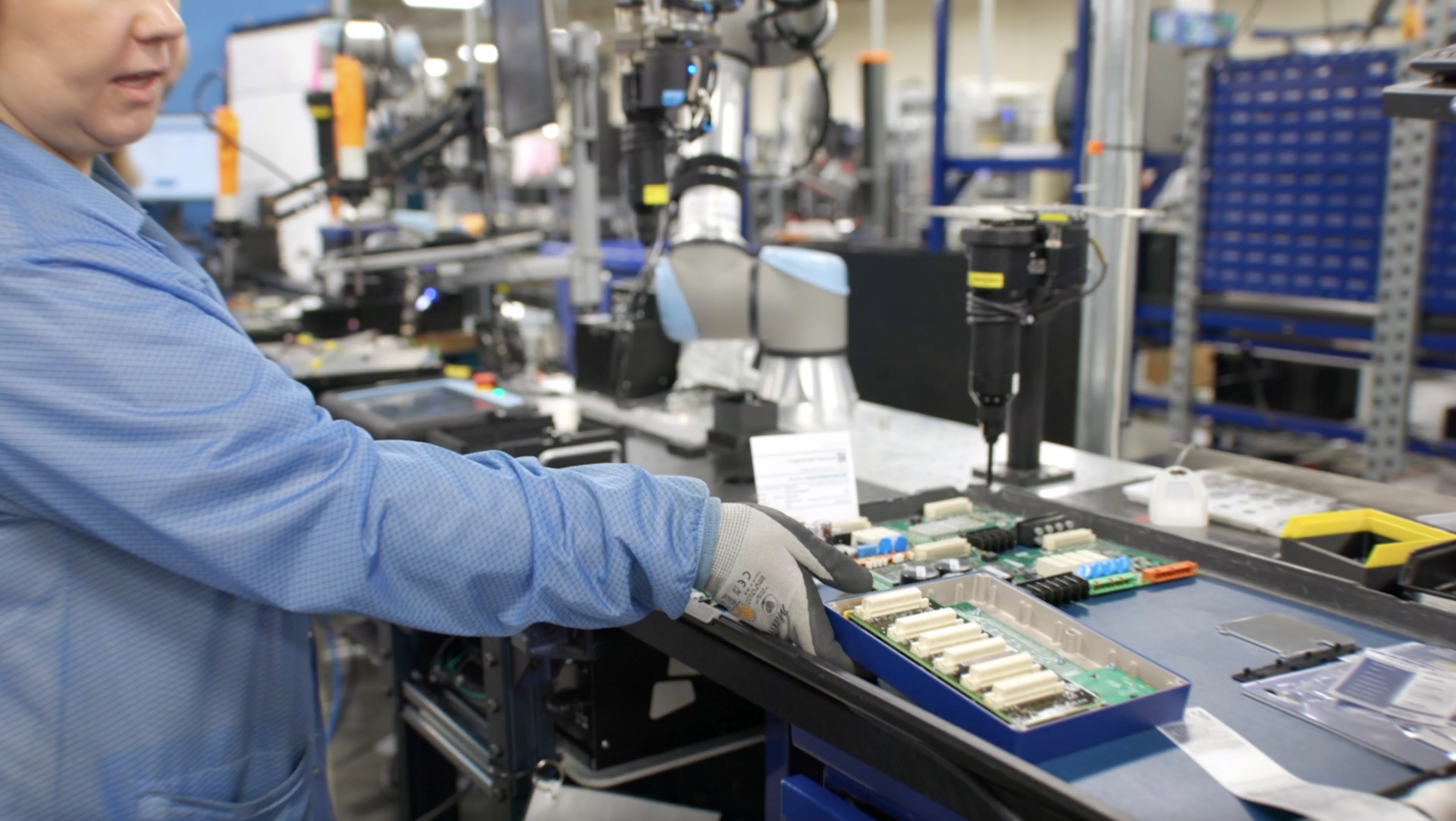
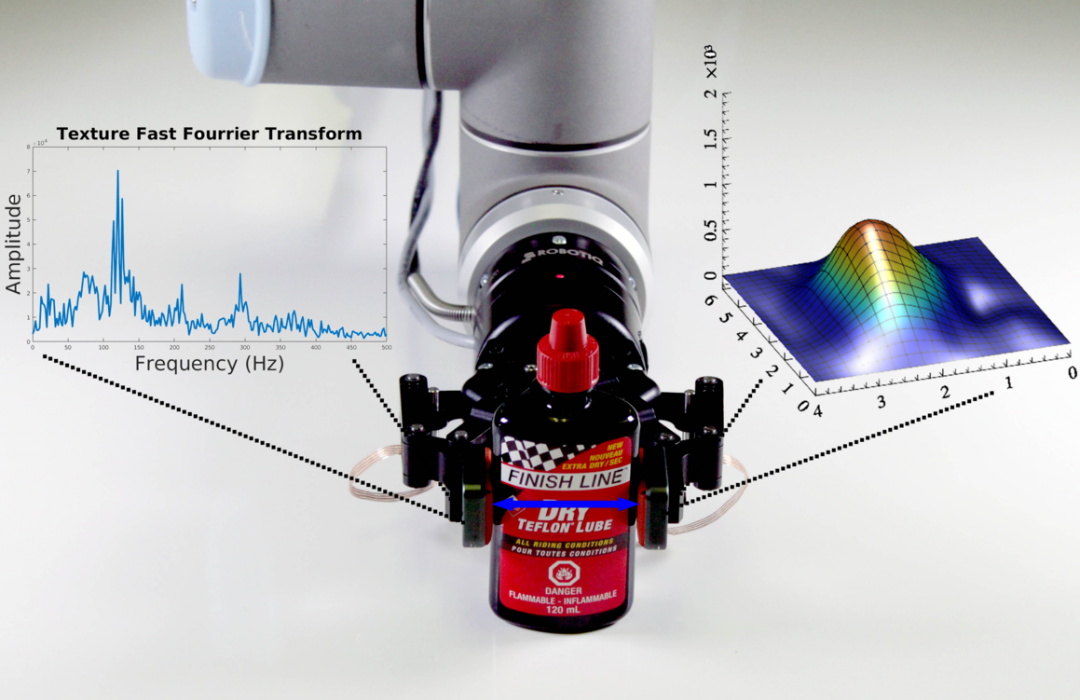
Il sensore di coppia FT 300-S effettua misurazioni precise, ripetibili e ad alta risoluzione. Questo strumento plug-and-play aumenta le capacità delle celle cobot, aumentando la destrezza, la flessibilità e l'affidabilità nelle applicazioni di assemblaggio, inserimento, pick-and-place, finitura, test di qualità e assistenza alle macchine.


Robotiq has a variety of technical information available for your solution.
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
Palletizing automation is one of the clearest wins in end-of-line operations. The ROI is real, the...
To reach the level of robustness the Physical AI community aspires to, namely generalist policies...
Vision-language-action models are the current state of the art in robotic manipulation. They still...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
Palletizing automation is one of the clearest wins in end-of-line operations. The ROI is real, the...
To reach the level of robustness the Physical AI community aspires to, namely generalist policies...
Vision-language-action models are the current state of the art in robotic manipulation. They still...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
Palletizing automation is one of the clearest wins in end-of-line operations. The ROI is real, the...
To reach the level of robustness the Physical AI community aspires to, namely generalist policies...
Vision-language-action models are the current state of the art in robotic manipulation. They still...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
Palletizing automation is one of the clearest wins in end-of-line operations. The ROI is real, the...
To reach the level of robustness the Physical AI community aspires to, namely generalist policies...
Vision-language-action models are the current state of the art in robotic manipulation. They still...
| Peso dell'utensile | 0,44 kg (1 lb) |
|---|---|
| Campo di misura | 300 N (FX, FY, FZ) / ± 30 Nm (MX, MY, MZ) |
| Capacità di sovraccarico | 500% |
| Sensibilità al rumore esterno | Immunità |
| Velocità di uscita dei dati | 100 Hz |
| Grado di protezione dall'ingresso (IP) | IP65 |
| Temperatura di esercizio | Da 15 a 35°C (da 59 a 95 °F) |
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
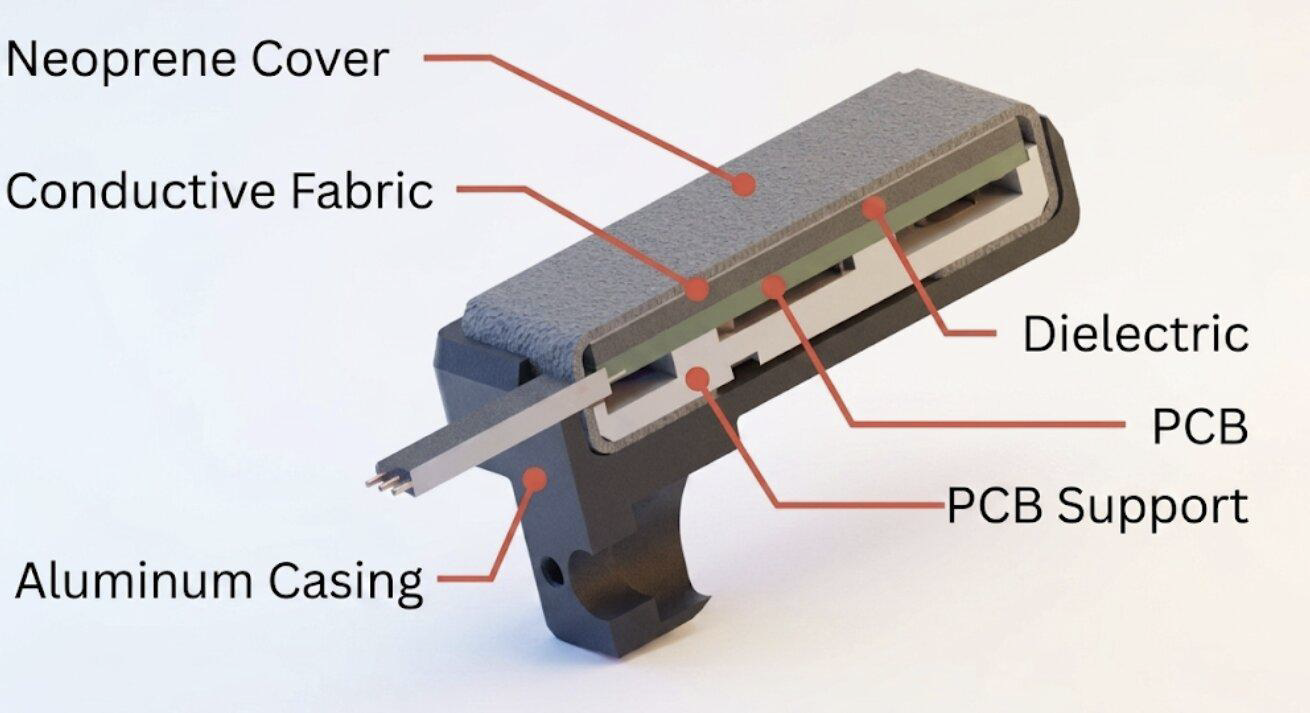
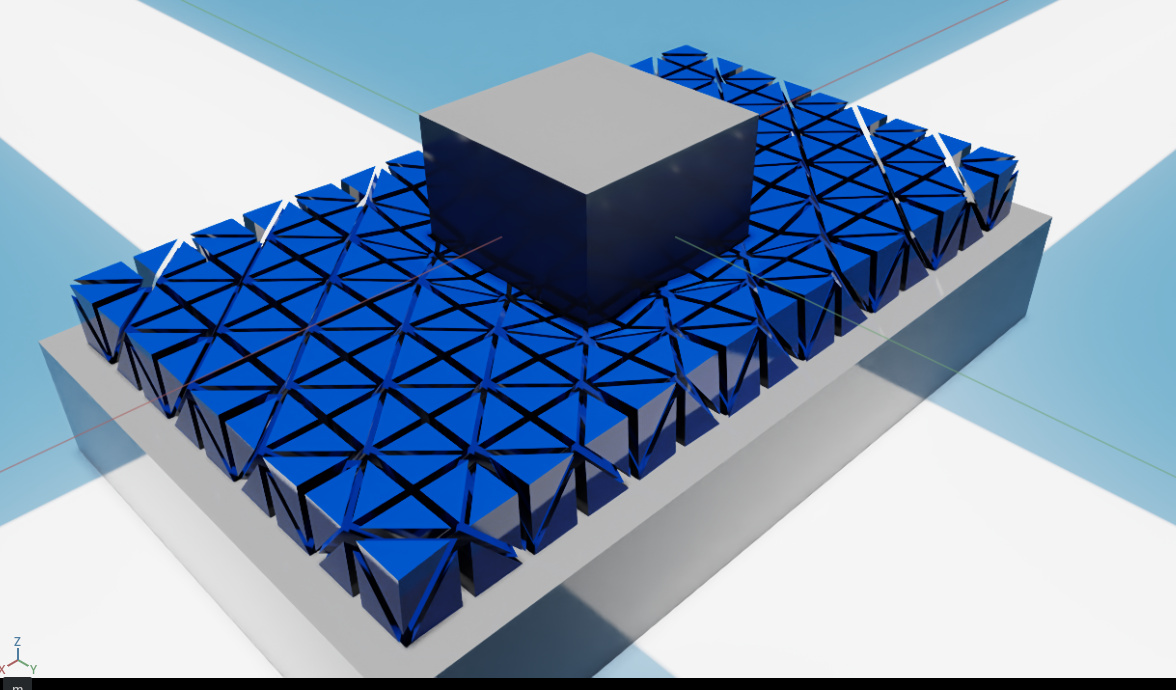
L’FT-300-S è un sensore di forza-coppia a 6 gradi di libertà (6-DOF) che fornisce ai sistemi di AI Fisica una percezione del contatto precisa e ad alta risoluzione per una manipolazione conforme e ricca di interazioni.
Rilevando e misurando con precisione le forze di interazione, consente ai robot di regolare il contatto, adattarsi alla variabilità e recuperare dall’incertezza nei compiti del mondo reale, riducendo l’effort di messa a punto, semplificando la programmazione e accelerando il passaggio dalla simulazione a un’implementazione affidabile.
Rilevamento forza-coppia a 6 DOF per AI Fisica e manipolazione ricca di contatto
Dati di forza ad alta risoluzione e a basso rumore per il controllo conforme e l’apprendimento
Tecnologia senza contatto per segnali stabili senza usura o invecchiamento
Bassa latenza e implementazione semplificata per pipeline AI
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
Palletizing automation is one of the clearest wins in end-of-line operations. The ROI is real, the...
To reach the level of robustness the Physical AI community aspires to, namely generalist policies...
Vision-language-action models are the current state of the art in robotic manipulation. They still...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
See how the 2-Finger Adaptive Robot Gripper helped triple Voodoo Manufacturing's 3D printing production
The ROI was a slam dunk from the beginning, from how much labor it saved. The installation process was the smoothest install of any piece of equipment I have had to experience in 28 years.
Vice-President, Cascade
coffee

Norem ipsum dolor sit amet, consectetur adipiscing elit. Etiam eu turpis molestie, dictum est a, mattis tellus. Sed dignissim, metus nec fringilla accumsan, risus sem sollicitudin lacus, ut interdum tellus elit sed risus. Maecenas eget condimentum velit, sit amet feugiat lectus.
Class aptent taciti sociosqu ad litora torquent per conubia nostra, per inceptos himenaeos. Praesent auctor purus luctus enim egestas, ac scelerisque ante pulvinar.
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
|---|---|---|---|
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |









.png?width=257&height=171&name=Frame%2011%20(3).png)
