
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...

.png?width=1441&height=680&name=AdobeStock_301220431%201%20(2).png)
CHARGE UTILE MAXIMALE
INDICE IP
COURSE PARALLÈLE




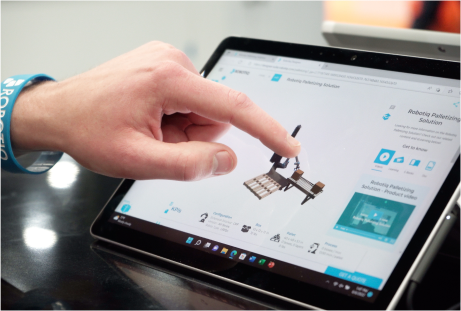
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...

Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...

Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...

Automation rarely starts with a full factory transformation. More often, it begins with a single...
Artificial intelligence has dramatically improved how robots perceive the world. Computer vision...

Coffee production is growing worldwide. From roasted beans to capsules and pods, manufacturers are...

Artificial intelligence is moving fast. Large language models can write emails, summarize reports,...
Artificial intelligence is transforming robotics. Vision systems can identify objects, machine...

Across many manufacturing facilities, one role remains surprisingly difficult to fill: palletizing....
.jpg)
At the end of the production line, everything comes together. Boxes are sealed, labeled, and ready...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day

Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Automation rarely starts with a full factory transformation. More often, it begins with a single...
Artificial intelligence has dramatically improved how robots perceive the world. Computer vision...
Coffee production is growing worldwide. From roasted beans to capsules and pods, manufacturers are...
Artificial intelligence is moving fast. Large language models can write emails, summarize reports,...
Artificial intelligence is transforming robotics. Vision systems can identify objects, machine...
Across many manufacturing facilities, one role remains surprisingly difficult to fill: palletizing....
At the end of the production line, everything comes together. Boxes are sealed, labeled, and ready...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
La pince Hand-E de Robotiq permet aux utilisateurs de prendre le contrôle. Une simple configuration avec un minimum de changements de programmation est tout ce qui est nécessaire pour les changements. En utilisant une seule pince pour des tâches multiples, les fabricants peuvent gagner du temps et de l'argent.



Robotiq has a variety of technical information available for your solution.
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Automation rarely starts with a full factory transformation. More often, it begins with a single...
Artificial intelligence has dramatically improved how robots perceive the world. Computer vision...
Coffee production is growing worldwide. From roasted beans to capsules and pods, manufacturers are...
Artificial intelligence is moving fast. Large language models can write emails, summarize reports,...
Artificial intelligence is transforming robotics. Vision systems can identify objects, machine...
Across many manufacturing facilities, one role remains surprisingly difficult to fill: palletizing....
At the end of the production line, everything comes together. Boxes are sealed, labeled, and ready...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Automation rarely starts with a full factory transformation. More often, it begins with a single...
Artificial intelligence has dramatically improved how robots perceive the world. Computer vision...
Coffee production is growing worldwide. From roasted beans to capsules and pods, manufacturers are...
Artificial intelligence is moving fast. Large language models can write emails, summarize reports,...
Artificial intelligence is transforming robotics. Vision systems can identify objects, machine...
Across many manufacturing facilities, one role remains surprisingly difficult to fill: palletizing....
At the end of the production line, everything comes together. Boxes are sealed, labeled, and ready...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Ce que les mains adaptative de Robotiq ont à offrir surpasse tous les concurrents.

Responsable de l’ingénierie de fabrication, Usinatech
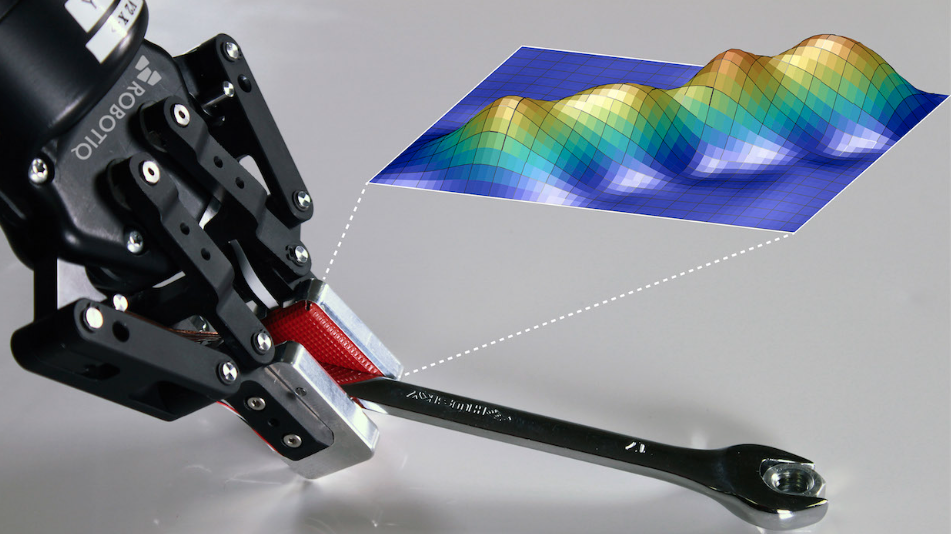
Nous sommes en mesure de connecter les mains adaptatives directement au poignet du robot, d'obtenir des informations sur la position et la force, et de savoir s'il y a une pièce là où il devrait y en avoir une et si c'est la bonne pièce.

Responsable R&D, Fusion OEM
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Automation rarely starts with a full factory transformation. More often, it begins with a single...
Artificial intelligence has dramatically improved how robots perceive the world. Computer vision...
Coffee production is growing worldwide. From roasted beans to capsules and pods, manufacturers are...
Artificial intelligence is moving fast. Large language models can write emails, summarize reports,...
Artificial intelligence is transforming robotics. Vision systems can identify objects, machine...
Across many manufacturing facilities, one role remains surprisingly difficult to fill: palletizing....
At the end of the production line, everything comes together. Boxes are sealed, labeled, and ready...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Automation rarely starts with a full factory transformation. More often, it begins with a single...
Artificial intelligence has dramatically improved how robots perceive the world. Computer vision...
Coffee production is growing worldwide. From roasted beans to capsules and pods, manufacturers are...
Artificial intelligence is moving fast. Large language models can write emails, summarize reports,...
Artificial intelligence is transforming robotics. Vision systems can identify objects, machine...
Across many manufacturing facilities, one role remains surprisingly difficult to fill: palletizing....
At the end of the production line, everything comes together. Boxes are sealed, labeled, and ready...
| Charge utile | 7 kg (15 lb) |
|---|---|
| Poids de l'outillage | 1 kg (2 lb) |
| Alimentation électrique | Électrique, connectée au poignet du robot (24 V, 2 A) |
| Paramètres de contrôle | Détection d'objet, position, vitesse et force |
| Garantie | 5 000 000 cycles |
| Course | 50 mm (2 po) |
| Force de saisie | 20 à 185 N (4,5 à 41 lbf) |
| Vitesse de fermeture | 150 mm/s (5,9 po/s) |
| Répétabilité | 0,025 mm (0,001 po) |
| Indice de protection (IP) | IP67 |
| Température de fonctionnement | -10 à 50 °C (14 à 122 °F) |
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Automation rarely starts with a full factory transformation. More often, it begins with a single...
Artificial intelligence has dramatically improved how robots perceive the world. Computer vision...
Coffee production is growing worldwide. From roasted beans to capsules and pods, manufacturers are...
Artificial intelligence is moving fast. Large language models can write emails, summarize reports,...
Artificial intelligence is transforming robotics. Vision systems can identify objects, machine...
Across many manufacturing facilities, one role remains surprisingly difficult to fill: palletizing....
At the end of the production line, everything comes together. Boxes are sealed, labeled, and ready...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
See how the 2-Finger Adaptive Robot Gripper helped triple Voodoo Manufacturing's 3D printing production
The ROI was a slam dunk from the beginning, from how much labor it saved. The installation process was the smoothest install of any piece of equipment I have had to experience in 28 years.
Vice-President, Cascade
coffee

Norem ipsum dolor sit amet, consectetur adipiscing elit. Etiam eu turpis molestie, dictum est a, mattis tellus. Sed dignissim, metus nec fringilla accumsan, risus sem sollicitudin lacus, ut interdum tellus elit sed risus. Maecenas eget condimentum velit, sit amet feugiat lectus.
Class aptent taciti sociosqu ad litora torquent per conubia nostra, per inceptos himenaeos. Praesent auctor purus luctus enim egestas, ac scelerisque ante pulvinar.
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
|---|---|---|---|
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Les pinces adaptatives Robotiq sont devenues une référence en recherche en robotique, largement utilisées dans les laboratoires pour la manipulation basée sur l’apprentissage et le développement de l’IA physique. Leur disponibilité, leur support technique et leur écosystème d’intégration en font une plateforme de manipulation incontournable pour les équipes axées sur l’expérimentation rapide et la collecte de données. Grâce à un déploiement rapide, une intégration fiable à grande échelle et un accès avancé au contrôle, les pinces Robotiq permettent aux ingénieurs de se concentrer sur le développement de l’intelligence et des applications réelles plutôt que sur la conception de matériel sur mesure.

Disponibilité élevée : manipulation fiable dans des environnements imprévisibles
Performance constante à grande échelle : matériel éprouvé, fiable et robuste
Intégration flexible pour les pipelines d’IA
90 % des tâches à 10 % du coût
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Automation rarely starts with a full factory transformation. More often, it begins with a single...
Artificial intelligence has dramatically improved how robots perceive the world. Computer vision...
Coffee production is growing worldwide. From roasted beans to capsules and pods, manufacturers are...
Artificial intelligence is moving fast. Large language models can write emails, summarize reports,...
Artificial intelligence is transforming robotics. Vision systems can identify objects, machine...
Across many manufacturing facilities, one role remains surprisingly difficult to fill: palletizing....
At the end of the production line, everything comes together. Boxes are sealed, labeled, and ready...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
See how the 2-Finger Adaptive Robot Gripper helped triple Voodoo Manufacturing's 3D printing production
The ROI was a slam dunk from the beginning, from how much labor it saved. The installation process was the smoothest install of any piece of equipment I have had to experience in 28 years.
Vice-President, Cascade
coffee
Norem ipsum dolor sit amet, consectetur adipiscing elit. Etiam eu turpis molestie, dictum est a, mattis tellus. Sed dignissim, metus nec fringilla accumsan, risus sem sollicitudin lacus, ut interdum tellus elit sed risus. Maecenas eget condimentum velit, sit amet feugiat lectus.
Class aptent taciti sociosqu ad litora torquent per conubia nostra, per inceptos himenaeos. Praesent auctor purus luctus enim egestas, ac scelerisque ante pulvinar.
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
|---|---|---|---|
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
CHARGE MAXIMALE
FORCE DE SAISIE
COURSE
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Automation rarely starts with a full factory transformation. More often, it begins with a single...
Artificial intelligence has dramatically improved how robots perceive the world. Computer vision...
Coffee production is growing worldwide. From roasted beans to capsules and pods, manufacturers are...
Artificial intelligence is moving fast. Large language models can write emails, summarize reports,...
Artificial intelligence is transforming robotics. Vision systems can identify objects, machine...
Across many manufacturing facilities, one role remains surprisingly difficult to fill: palletizing....
At the end of the production line, everything comes together. Boxes are sealed, labeled, and ready...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Les mains adaptatives à 2 doigts de Robotiq allient précision, efficacité et polyvalence, optimisant ainsi la manipulation lors de la fabrication. Leur intégration facile et leurs capacités de contrôle améliorent la productivité et réduisent les temps d'arrêt. Durables et nécessitant peu d'entretien, elles sont adaptables à une grande variété d'applications, améliorant considérablement l'efficacité opérationnelle.

Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Automation rarely starts with a full factory transformation. More often, it begins with a single...
Artificial intelligence has dramatically improved how robots perceive the world. Computer vision...
Coffee production is growing worldwide. From roasted beans to capsules and pods, manufacturers are...
Artificial intelligence is moving fast. Large language models can write emails, summarize reports,...
Artificial intelligence is transforming robotics. Vision systems can identify objects, machine...
Across many manufacturing facilities, one role remains surprisingly difficult to fill: palletizing....
At the end of the production line, everything comes together. Boxes are sealed, labeled, and ready...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Automation rarely starts with a full factory transformation. More often, it begins with a single...
Artificial intelligence has dramatically improved how robots perceive the world. Computer vision...
Coffee production is growing worldwide. From roasted beans to capsules and pods, manufacturers are...
Artificial intelligence is moving fast. Large language models can write emails, summarize reports,...
Artificial intelligence is transforming robotics. Vision systems can identify objects, machine...
Across many manufacturing facilities, one role remains surprisingly difficult to fill: palletizing....
At the end of the production line, everything comes together. Boxes are sealed, labeled, and ready...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Lorsque les clients arrivent, vous avez l'air d'être à la pointe de la technologie.

Président, Walt Machine Inc.
Robotiq disposait d'une solution unique : une main adaptative fiable capable de gérer rapidement les changements de pièces, ce qui était important pour notre production à grande diversité et à grand volume.

Ingénieur de fabrication, Sennheiser Manufacturing USA
La main 2F-85 est très intuitive en termes de force, d'ouverture et d'activation. Pour tout ce qui concerne le transfert d’objets, vous pouvez installer le bout des doigts comme vous le souhaitez.

Directeur de l'amélioration continue, APN
Nous avions besoin d'une main adaptative très flexible avec laquelle nous pourrions facilement surveiller la force et la distance entre deux points. La main 2F-85 était un choix évident.

PDG, KPE Engineering, Diehl
Je n'avais pas de compétences particulières en programmation, mais j'ai trouvé qu'il était très facile, avec quelques notions de logique, de programmer le robot, la main adaptative à 2 doigts et la caméra de poignet.

Ingénieur en conception mécanique, Assa Abloy
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Automation rarely starts with a full factory transformation. More often, it begins with a single...
Artificial intelligence has dramatically improved how robots perceive the world. Computer vision...
Coffee production is growing worldwide. From roasted beans to capsules and pods, manufacturers are...
Artificial intelligence is moving fast. Large language models can write emails, summarize reports,...
Artificial intelligence is transforming robotics. Vision systems can identify objects, machine...
Across many manufacturing facilities, one role remains surprisingly difficult to fill: palletizing....
At the end of the production line, everything comes together. Boxes are sealed, labeled, and ready...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Automation rarely starts with a full factory transformation. More often, it begins with a single...
Artificial intelligence has dramatically improved how robots perceive the world. Computer vision...
Coffee production is growing worldwide. From roasted beans to capsules and pods, manufacturers are...
Artificial intelligence is moving fast. Large language models can write emails, summarize reports,...
Artificial intelligence is transforming robotics. Vision systems can identify objects, machine...
Across many manufacturing facilities, one role remains surprisingly difficult to fill: palletizing....
At the end of the production line, everything comes together. Boxes are sealed, labeled, and ready...
| Charge utile | 5 kg (11 lb) |
|---|---|
| Poids de l'outillage | 1 kg (2 lb) |
| Source d'énergie | Électricité, connectée au poignet du robot (24 V, 2 A) |
| Paramètres de contrôle | Détection d'objet, position, vitesse et force |
| Garantie | 2 000 000 cycles |
| Course | 85 mm (3,3 po) |
| Force de préhension | 20 à 235 N (4,5 à 50 lbf) |
| Vitesse de fermeture | 20 à 150 mm/s (0,8 à 5,9 po/s) |
| Répétabilité | 0.05 mm (0.002 in) |
| Indice de protection (IP) | IP40 |
| Operating temperature | -10 à 50 °C (14 à 122 °F) |
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Automation rarely starts with a full factory transformation. More often, it begins with a single...
Artificial intelligence has dramatically improved how robots perceive the world. Computer vision...
Coffee production is growing worldwide. From roasted beans to capsules and pods, manufacturers are...
Artificial intelligence is moving fast. Large language models can write emails, summarize reports,...
Artificial intelligence is transforming robotics. Vision systems can identify objects, machine...
Across many manufacturing facilities, one role remains surprisingly difficult to fill: palletizing....
At the end of the production line, everything comes together. Boxes are sealed, labeled, and ready...
| Charge utile | 2,5 kg (5,5 lb) |
|---|---|
| Poids de l'outillage | 1 kg (2 lb) |
| Source d'énergie | Électricité, connectée au poignet du robot (24 V, 2 A) |
| Paramètres de contrôle | Détection d'objet, position, vitesse et force |
| Garantie | 2 000 000 cycles |
| Course | 140 mm (5,5 po) |
| Force de préhension | 10 à 125 N (2 à 25 lbf) |
| Vitesse de fermeture | 30 à 250 mm/s (1,2 à 9,8 po/s) |
| Répétabilité | 0.08 mm (0.003 in) |
| Indice de protection (IP) | IP40 |
| Température de fonctionnement | -10 à 50 °C (14 à 122 °F) |
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Automation rarely starts with a full factory transformation. More often, it begins with a single...
Artificial intelligence has dramatically improved how robots perceive the world. Computer vision...
Coffee production is growing worldwide. From roasted beans to capsules and pods, manufacturers are...
Artificial intelligence is moving fast. Large language models can write emails, summarize reports,...
Artificial intelligence is transforming robotics. Vision systems can identify objects, machine...
Across many manufacturing facilities, one role remains surprisingly difficult to fill: palletizing....
At the end of the production line, everything comes together. Boxes are sealed, labeled, and ready...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
See how the 2-Finger Adaptive Robot Gripper helped triple Voodoo Manufacturing's 3D printing production
The ROI was a slam dunk from the beginning, from how much labor it saved. The installation process was the smoothest install of any piece of equipment I have had to experience in 28 years.
Vice-President, Cascade
coffee
Norem ipsum dolor sit amet, consectetur adipiscing elit. Etiam eu turpis molestie, dictum est a, mattis tellus. Sed dignissim, metus nec fringilla accumsan, risus sem sollicitudin lacus, ut interdum tellus elit sed risus. Maecenas eget condimentum velit, sit amet feugiat lectus.
Class aptent taciti sociosqu ad litora torquent per conubia nostra, per inceptos himenaeos. Praesent auctor purus luctus enim egestas, ac scelerisque ante pulvinar.
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
|---|---|---|---|
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Les pinces adaptatives Robotiq sont devenues une référence en recherche en robotique, largement utilisées dans les laboratoires pour la manipulation basée sur l’apprentissage et le développement de l’IA physique. Leur disponibilité, leur support technique et leur écosystème d’intégration en font une plateforme de manipulation incontournable pour les équipes axées sur l’expérimentation rapide et la collecte de données. Grâce à un déploiement rapide, une intégration fiable à grande échelle et un accès avancé au contrôle, les pinces Robotiq permettent aux ingénieurs de se concentrer sur le développement de l’intelligence et des applications réelles plutôt que sur la conception de matériel sur mesure.

Disponibilité élevée : manipulation fiable dans des environnements imprévisibles
Performance constante à grande échelle : matériel éprouvé, fiable et robuste
Intégration flexible pour les pipelines d’IA
90 % des tâches à 10 % du coût
Les mains adaptatives à 2 doigts de Robotiq allient précision, efficacité et polyvalence, optimisant ainsi la manipulation lors de la fabrication. Leur intégration facile et leurs capacités de contrôle améliorent la productivité et réduisent les temps d'arrêt. Durables et nécessitant peu d'entretien, elles sont adaptables à une grande variété d'applications, améliorant considérablement l'efficacité opérationnelle.



Robotiq has a variety of technical information available for your solution.
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Automation rarely starts with a full factory transformation. More often, it begins with a single...
Artificial intelligence has dramatically improved how robots perceive the world. Computer vision...
Coffee production is growing worldwide. From roasted beans to capsules and pods, manufacturers are...
Artificial intelligence is moving fast. Large language models can write emails, summarize reports,...
Artificial intelligence is transforming robotics. Vision systems can identify objects, machine...
Across many manufacturing facilities, one role remains surprisingly difficult to fill: palletizing....
At the end of the production line, everything comes together. Boxes are sealed, labeled, and ready...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
CHARGE UTILE MAXIMALE
INDICE IP
COURSE DIAMÈTRAL
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Automation rarely starts with a full factory transformation. More often, it begins with a single...
Artificial intelligence has dramatically improved how robots perceive the world. Computer vision...
Coffee production is growing worldwide. From roasted beans to capsules and pods, manufacturers are...
Artificial intelligence is moving fast. Large language models can write emails, summarize reports,...
Artificial intelligence is transforming robotics. Vision systems can identify objects, machine...
Across many manufacturing facilities, one role remains surprisingly difficult to fill: palletizing....
At the end of the production line, everything comes together. Boxes are sealed, labeled, and ready...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day

Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Automation rarely starts with a full factory transformation. More often, it begins with a single...
Artificial intelligence has dramatically improved how robots perceive the world. Computer vision...
Coffee production is growing worldwide. From roasted beans to capsules and pods, manufacturers are...
Artificial intelligence is moving fast. Large language models can write emails, summarize reports,...
Artificial intelligence is transforming robotics. Vision systems can identify objects, machine...
Across many manufacturing facilities, one role remains surprisingly difficult to fill: palletizing....
At the end of the production line, everything comes together. Boxes are sealed, labeled, and ready...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Le préhenseur Hand-E C10 de Robotiq permet aux utilisateurs de prendre le contrôle. Une simple configuration avec un minimum de changements de programmation est tout ce qui est nécessaire pour les changements. En utilisant une seule pince pour des tâches multiples, les fabricants peuvent gagner du temps et de l'argent.

Robotiq has a variety of technical information available for your solution.
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Automation rarely starts with a full factory transformation. More often, it begins with a single...
Artificial intelligence has dramatically improved how robots perceive the world. Computer vision...
Coffee production is growing worldwide. From roasted beans to capsules and pods, manufacturers are...
Artificial intelligence is moving fast. Large language models can write emails, summarize reports,...
Artificial intelligence is transforming robotics. Vision systems can identify objects, machine...
Across many manufacturing facilities, one role remains surprisingly difficult to fill: palletizing....
At the end of the production line, everything comes together. Boxes are sealed, labeled, and ready...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Automation rarely starts with a full factory transformation. More often, it begins with a single...
Artificial intelligence has dramatically improved how robots perceive the world. Computer vision...
Coffee production is growing worldwide. From roasted beans to capsules and pods, manufacturers are...
Artificial intelligence is moving fast. Large language models can write emails, summarize reports,...
Artificial intelligence is transforming robotics. Vision systems can identify objects, machine...
Across many manufacturing facilities, one role remains surprisingly difficult to fill: palletizing....
At the end of the production line, everything comes together. Boxes are sealed, labeled, and ready...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Ce que les mains adaptative de Robotiq ont à offrir surpasse tous les concurrents.
Responsable de l’ingénierie de fabrication, Usinatech
Nous sommes en mesure de connecter les mains adaptatives directement au poignet du robot, d'obtenir des informations sur la position et la force, et de savoir s'il y a une pièce là où il devrait y en avoir une et si c'est la bonne pièce.
Responsable R&D, Fusion OEM
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Automation rarely starts with a full factory transformation. More often, it begins with a single...
Artificial intelligence has dramatically improved how robots perceive the world. Computer vision...
Coffee production is growing worldwide. From roasted beans to capsules and pods, manufacturers are...
Artificial intelligence is moving fast. Large language models can write emails, summarize reports,...
Artificial intelligence is transforming robotics. Vision systems can identify objects, machine...
Across many manufacturing facilities, one role remains surprisingly difficult to fill: palletizing....
At the end of the production line, everything comes together. Boxes are sealed, labeled, and ready...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Automation rarely starts with a full factory transformation. More often, it begins with a single...
Artificial intelligence has dramatically improved how robots perceive the world. Computer vision...
Coffee production is growing worldwide. From roasted beans to capsules and pods, manufacturers are...
Artificial intelligence is moving fast. Large language models can write emails, summarize reports,...
Artificial intelligence is transforming robotics. Vision systems can identify objects, machine...
Across many manufacturing facilities, one role remains surprisingly difficult to fill: palletizing....
At the end of the production line, everything comes together. Boxes are sealed, labeled, and ready...
| Charge utile | 10 kg (22 lb) |
|---|---|
| Poids de l'outillage | 1.695 kg (3.746 lb) |
| Alimentation électrique | Électrique, connectée au poignet du robot (24 V, 2 A) |
| Paramètres de contrôle | Détection d'objet, position, vitesse et force |
| Garantie | 5 000 000 cycles |
| Course (Diamètre) | 40 mm (1.57 in) |
| Force de saisie (par doigt) | 25N à 175 N (5.6 à 39.34 lbf) |
| Vitesse de fermeture | 14 à 107 mm/s (0.55 à 4.21 in/s) |
| Répétabilité | 0,04 mm (0,002 in) |
| Indice de protection (IP) | IP67 |
| Température de fonctionnement | -10 à 50 °C (14 à 122 °F) |
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Automation rarely starts with a full factory transformation. More often, it begins with a single...
Artificial intelligence has dramatically improved how robots perceive the world. Computer vision...
Coffee production is growing worldwide. From roasted beans to capsules and pods, manufacturers are...
Artificial intelligence is moving fast. Large language models can write emails, summarize reports,...
Artificial intelligence is transforming robotics. Vision systems can identify objects, machine...
Across many manufacturing facilities, one role remains surprisingly difficult to fill: palletizing....
At the end of the production line, everything comes together. Boxes are sealed, labeled, and ready...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
See how the 2-Finger Adaptive Robot Gripper helped triple Voodoo Manufacturing's 3D printing production
The ROI was a slam dunk from the beginning, from how much labor it saved. The installation process was the smoothest install of any piece of equipment I have had to experience in 28 years.
Vice-President, Cascade
coffee
Norem ipsum dolor sit amet, consectetur adipiscing elit. Etiam eu turpis molestie, dictum est a, mattis tellus. Sed dignissim, metus nec fringilla accumsan, risus sem sollicitudin lacus, ut interdum tellus elit sed risus. Maecenas eget condimentum velit, sit amet feugiat lectus.
Class aptent taciti sociosqu ad litora torquent per conubia nostra, per inceptos himenaeos. Praesent auctor purus luctus enim egestas, ac scelerisque ante pulvinar.
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
|---|---|---|---|
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
CHARGE MAXIMALE
FORCE DE PRÉHENSION
OUVERTURE DE LA MAIN

Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Automation rarely starts with a full factory transformation. More often, it begins with a single...
Artificial intelligence has dramatically improved how robots perceive the world. Computer vision...
Coffee production is growing worldwide. From roasted beans to capsules and pods, manufacturers are...
Artificial intelligence is moving fast. Large language models can write emails, summarize reports,...
Artificial intelligence is transforming robotics. Vision systems can identify objects, machine...
Across many manufacturing facilities, one role remains surprisingly difficult to fill: palletizing....
At the end of the production line, everything comes together. Boxes are sealed, labeled, and ready...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day

Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Automation rarely starts with a full factory transformation. More often, it begins with a single...
Artificial intelligence has dramatically improved how robots perceive the world. Computer vision...
Coffee production is growing worldwide. From roasted beans to capsules and pods, manufacturers are...
Artificial intelligence is moving fast. Large language models can write emails, summarize reports,...
Artificial intelligence is transforming robotics. Vision systems can identify objects, machine...
Across many manufacturing facilities, one role remains surprisingly difficult to fill: palletizing....
At the end of the production line, everything comes together. Boxes are sealed, labeled, and ready...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
La main adaptative à 3 doigts est un mélange parfait de durabilité, d'intégration rapide et de fonctionnalité polyvalente. Sa construction robuste est conçue pour les applications industrielles les plus difficiles, offrant une compatibilité parfaite avec une gamme de robots. Notre interface de programmation intuitive garantit une configuration rapide, tandis que ses diverses capacités de préhension et son contrôle précis répondent à un large éventail de besoins opérationnels.



Robotiq has a variety of technical information available for your solution.
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Automation rarely starts with a full factory transformation. More often, it begins with a single...
Artificial intelligence has dramatically improved how robots perceive the world. Computer vision...
Coffee production is growing worldwide. From roasted beans to capsules and pods, manufacturers are...
Artificial intelligence is moving fast. Large language models can write emails, summarize reports,...
Artificial intelligence is transforming robotics. Vision systems can identify objects, machine...
Across many manufacturing facilities, one role remains surprisingly difficult to fill: palletizing....
At the end of the production line, everything comes together. Boxes are sealed, labeled, and ready...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Automation rarely starts with a full factory transformation. More often, it begins with a single...
Artificial intelligence has dramatically improved how robots perceive the world. Computer vision...
Coffee production is growing worldwide. From roasted beans to capsules and pods, manufacturers are...
Artificial intelligence is moving fast. Large language models can write emails, summarize reports,...
Artificial intelligence is transforming robotics. Vision systems can identify objects, machine...
Across many manufacturing facilities, one role remains surprisingly difficult to fill: palletizing....
At the end of the production line, everything comes together. Boxes are sealed, labeled, and ready...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Automation rarely starts with a full factory transformation. More often, it begins with a single...
Artificial intelligence has dramatically improved how robots perceive the world. Computer vision...
Coffee production is growing worldwide. From roasted beans to capsules and pods, manufacturers are...
Artificial intelligence is moving fast. Large language models can write emails, summarize reports,...
Artificial intelligence is transforming robotics. Vision systems can identify objects, machine...
Across many manufacturing facilities, one role remains surprisingly difficult to fill: palletizing....
At the end of the production line, everything comes together. Boxes are sealed, labeled, and ready...
| Charge utile | 10 kg (22 lb) |
|---|---|
| Poids de l'outillage | 2,3 kg (5 lb) |
| Source d'énergie | Électricité |
| Paramètres de contrôle | Détection d'objet, position, vitesse et force |
| Course | 155 mm (6 po) |
| Force de préhension | 30 à 70 N (6,7 à 15,7 lbf) |
| Vitesse de fermeture | 22 à 110 mm/s (0,9 po à 4,3 po/s) |
| Répétabilité | 0,05 mm (0,2 po) |
| Température de fonctionnement | -10 à 50 °C (14 à 122 °F) |
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Automation rarely starts with a full factory transformation. More often, it begins with a single...
Artificial intelligence has dramatically improved how robots perceive the world. Computer vision...
Coffee production is growing worldwide. From roasted beans to capsules and pods, manufacturers are...
Artificial intelligence is moving fast. Large language models can write emails, summarize reports,...
Artificial intelligence is transforming robotics. Vision systems can identify objects, machine...
Across many manufacturing facilities, one role remains surprisingly difficult to fill: palletizing....
At the end of the production line, everything comes together. Boxes are sealed, labeled, and ready...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
See how the 2-Finger Adaptive Robot Gripper helped triple Voodoo Manufacturing's 3D printing production
The ROI was a slam dunk from the beginning, from how much labor it saved. The installation process was the smoothest install of any piece of equipment I have had to experience in 28 years.
Vice-President, Cascade
coffee
Norem ipsum dolor sit amet, consectetur adipiscing elit. Etiam eu turpis molestie, dictum est a, mattis tellus. Sed dignissim, metus nec fringilla accumsan, risus sem sollicitudin lacus, ut interdum tellus elit sed risus. Maecenas eget condimentum velit, sit amet feugiat lectus.
Class aptent taciti sociosqu ad litora torquent per conubia nostra, per inceptos himenaeos. Praesent auctor purus luctus enim egestas, ac scelerisque ante pulvinar.
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
|---|---|---|---|
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |


















.png?width=257&height=171&name=Frame%2011%20(3).png)

.png?width=257&height=171&name=Frame%2011%20(2).png)