.jpeg?width=2000&name=2F85-Wrist-Camera-Machine-Tending-Walt-Machine-58%20(1).jpeg)
La différence Robotiq

Augmenter la productivité
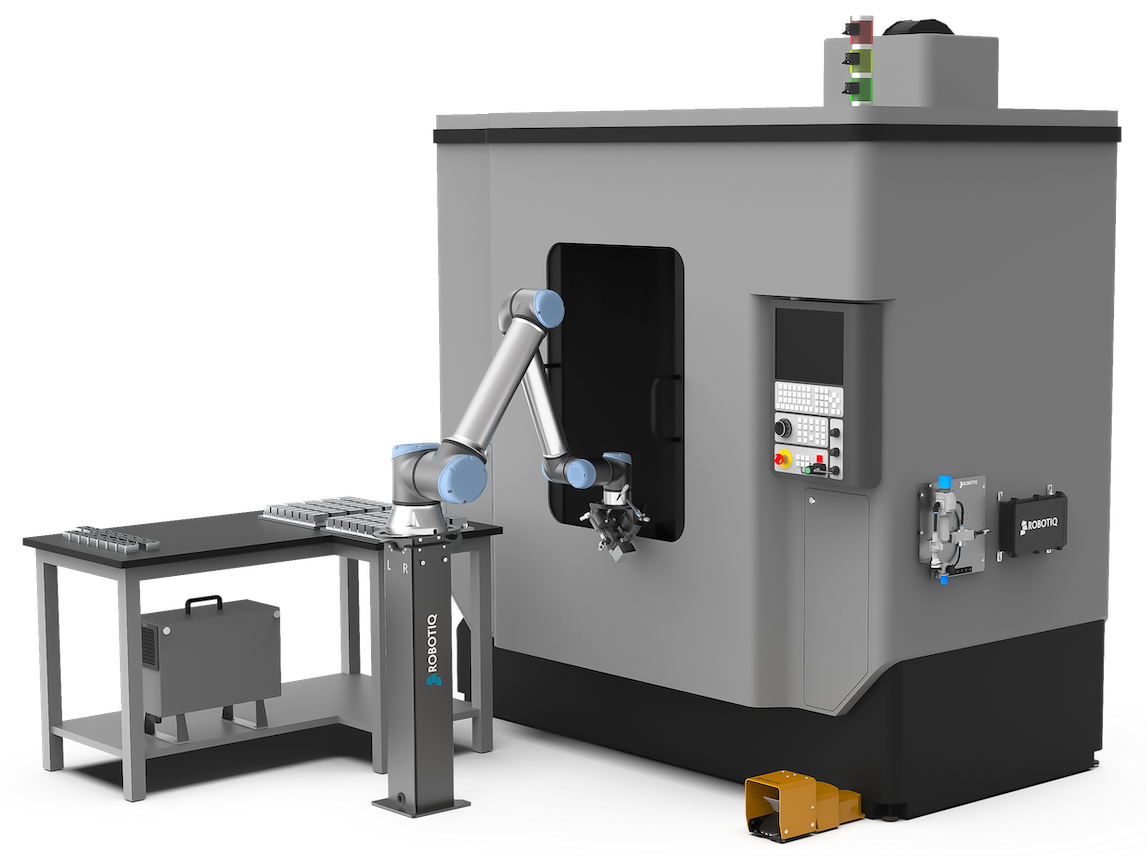
L'automatisation des opérations d'alimentation des machines permet à un seul opérateur de s'occuper du contrôle qualité et de la gestion des pièces pour plusieurs cobots. Votre équipe peut se consacrer à des tâches à plus grande valeur ajoutée, ce qui augmente l'efficacité globale de la main-d'œuvre en utilisant au mieux le personnel hautement performant.

Renforcer les capacités de votre personnel
La solution de Robotiq vous permet de recentrer les employés qualifiés dans des domaines de tâches à haute valeur ajoutée qui offrent autonomie et variété. Les configurations sont conviviales et permettent à votre personnel de développer de nouvelles compétences. De plus, les programmes sont créés 75 % plus rapidement qu'avec la programmation traditionnelle.

Favoriser la capacité d'adaptation
L'approche éprouvée et normalisée de la solution accélère la mise en œuvre en traitant les problèmes complexes à l'avance. Elle garantit la compatibilité avec toutes les machines, quel que soit le modèle, le type ou l'âge, et simplifie la mise à l'échelle en offrant une solution, un langage et une formation universels.






-3.jpg?width=1612&height=1612&name=Vincent+Hugo%203%20(3)-3.jpg)



-1.png?width=932&height=600&name=eLearning-logo%20en%20tete%20noir%20@2x%20(1)-1.png)



.jpg?width=1200&length=1200&name=2F85-Wrist-Camera-Machine-Tending-Walt-Machine-49%20(2).jpg)


.jpg?width=1200&length=1200&name=c10%20(3).jpg)



