Part 1 of 2, Physical AI: The DARPA Legacy & the Road Ahead. What the DARPA Robotics Challenge...


KIT DI LEVIGATURA
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day


Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Part 1 of 2, Physical AI: The DARPA Legacy & the Road Ahead. What the DARPA Robotics Challenge...
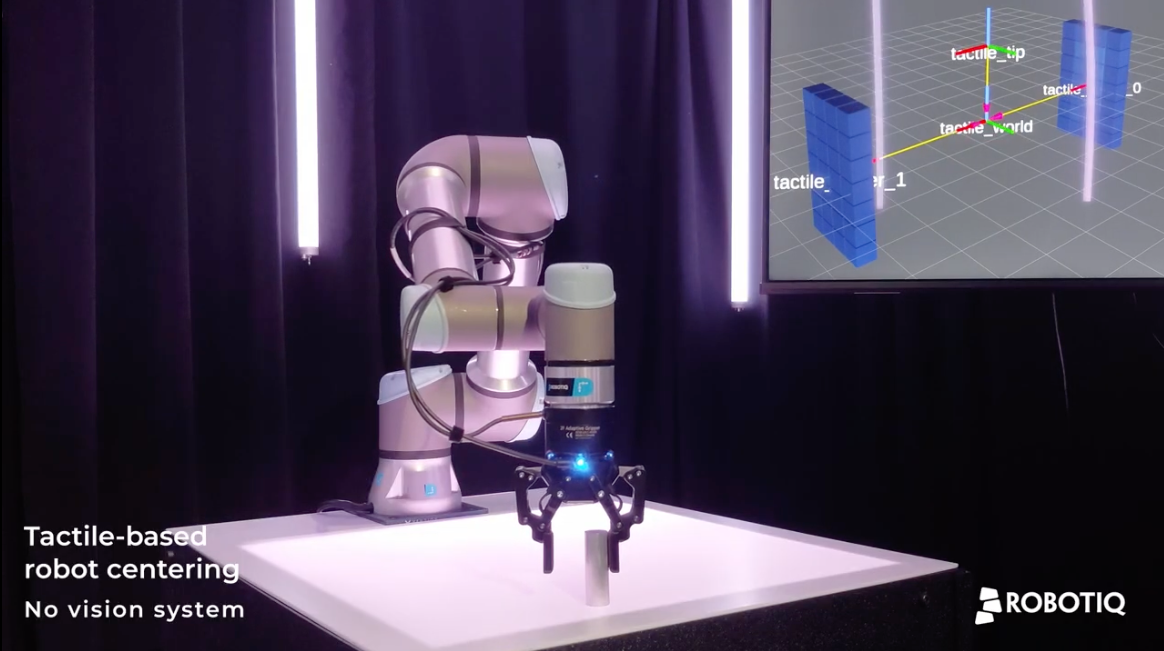
A robot does not always grip a part exactly where intended. Vision may guide the gripper close, but...

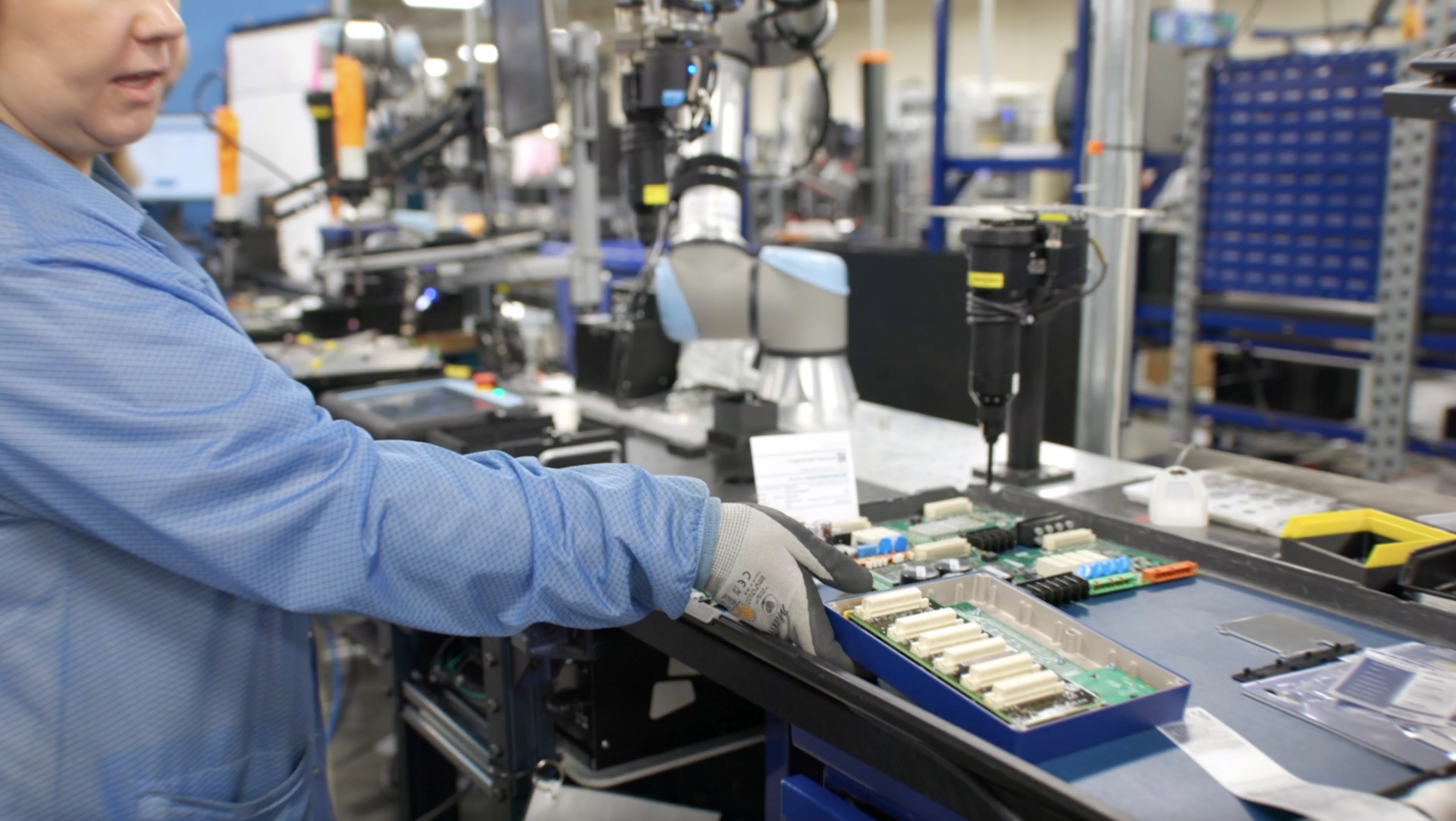
If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...

In the heart of Provence, a small French bottling company is proving that automation isn't just for...
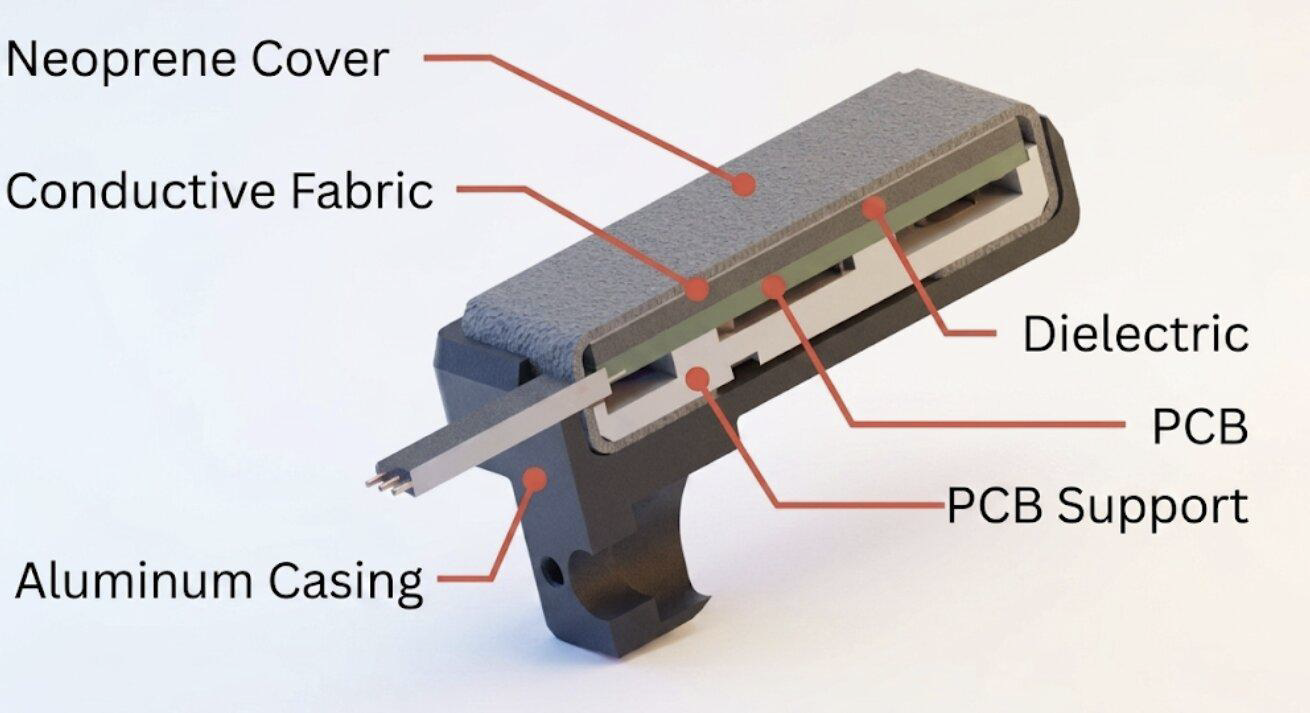
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
.png)
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...

Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...

Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day

Il kit di levigatura Robotiq migliora la finitura delle superfici grazie al suo design adattabile e alla sua perfetta integrazione. Dotato di un'interfaccia facile da usare, facilita la configurazione immediata per gli utenti con competenze diverse. Il kit garantisce una levigatura uniforme grazie alla conformità adattabile e al controllo avanzato del movimento, fondamentali per ottenere finiture di qualità costante.



Robotiq has a variety of technical information available for your solution.
Part 1 of 2, Physical AI: The DARPA Legacy & the Road Ahead. What the DARPA Robotics Challenge...
A robot does not always grip a part exactly where intended. Vision may guide the gripper close, but...
If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Part 1 of 2, Physical AI: The DARPA Legacy & the Road Ahead. What the DARPA Robotics Challenge...
A robot does not always grip a part exactly where intended. Vision may guide the gripper close, but...
If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Part 1 of 2, Physical AI: The DARPA Legacy & the Road Ahead. What the DARPA Robotics Challenge...
A robot does not always grip a part exactly where intended. Vision may guide the gripper close, but...
If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Part 1 of 2, Physical AI: The DARPA Legacy & the Road Ahead. What the DARPA Robotics Challenge...
A robot does not always grip a part exactly where intended. Vision may guide the gripper close, but...
If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
| Alimentazione massima di aria | 6,2 bar (90 PSI) |
|---|---|
| Flusso d'aria (velocità massima) | 450 l/min |
| Diametro del tampone | 127 mm (5 pollici) |
| Media | Gancio e anello; 5 fori |
| Diametro dell'orbita | 4,8 mm (3/16 di pollice) |
| Velocità massima | 12.000 GIRI/MIN. |
| Ingresso alimentazione aria | Filettatura NPT da 1/4 di pollice |
| Scarico delle polveri | Predisposto per l'aspirazione centralizzata; diametro 25 mm (1 poll.) |
| Peso dell'utensile | 0,42 kg (1 lb) |
| Altezza aggiunta | 9 mm (0,35 pollici) |
| Levigatrici compatibili | Dynabrade 56854B, 56819B, 56830B, 56863B, 56844B, 57404B, 57814B |
| Grana | 60, 80, 120, 320, 400 |
-modified.png?width=350&height=350&name=fc7803907d3b0b85e9399396796ef3e5b22dd116072b1d30723ceed35be168db%20(1)-modified.png)







.png?width=257&height=171&name=Frame%2011%20(3).png)
