When you think about automating a production line, it’s easy to imagine a major investment, a...


SANDING KIT
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day


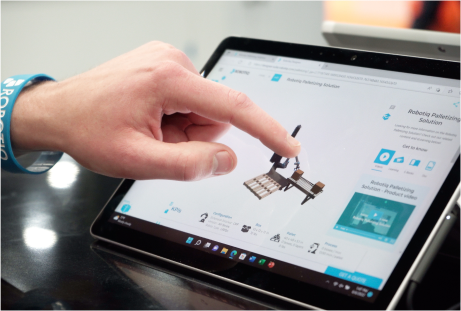
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
When you think about automating a production line, it’s easy to imagine a major investment, a...
Some wins start with a product demo. Others start with a follow-up. This one started with a dry...

I just wrapped up a factory acceptance test (FAT) in Spain with a global player in the personal...

Founded in 1950, Caffè Corsini is an iconic name in Italian coffee, exporting to over 60 countries...

Every two years, Automatica brings together the brightest minds and boldest machines in...

When manufacturers think about return on investment, they often look at numbers tied to output:...

If your team stacks boxes all day, ergonomics shouldn’t be an afterthought; it should be the first...

"Is it under 20 pounds? Then it’s fine to lift." That myth has lived too long on factory floors. In...

Manual palletizing might look simple. But behind every lift is a set of forces, postures, and risks...
When the biggest names in tech choose a tool, the industry takes notice. Recently, Robotiq Adaptive...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day

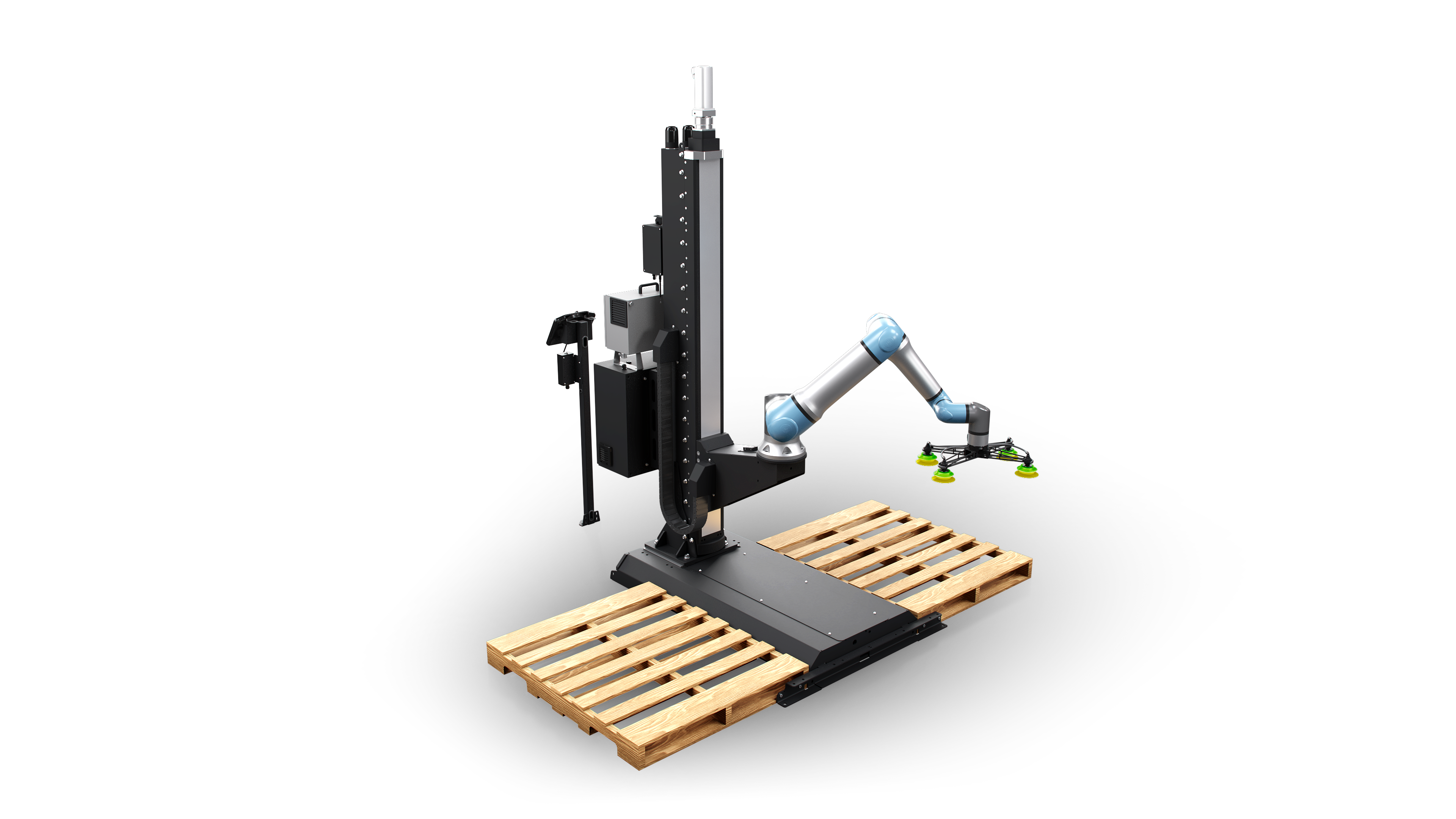
The Robotiq Sanding Kit enhances surface finishing through its adaptable design and seamless integration. Featuring a user-friendly interface, it facilitates straightforward setup for users of varying expertise. The kit ensures uniform sanding with its adaptable compliance and advanced motion control, which are critical for consistent quality finishes.



Robotiq has a variety of technical information available for your solution.
When you think about automating a production line, it’s easy to imagine a major investment, a...
Some wins start with a product demo. Others start with a follow-up. This one started with a dry...
I just wrapped up a factory acceptance test (FAT) in Spain with a global player in the personal...
Founded in 1950, Caffè Corsini is an iconic name in Italian coffee, exporting to over 60 countries...
Every two years, Automatica brings together the brightest minds and boldest machines in...
When manufacturers think about return on investment, they often look at numbers tied to output:...
If your team stacks boxes all day, ergonomics shouldn’t be an afterthought; it should be the first...
"Is it under 20 pounds? Then it’s fine to lift." That myth has lived too long on factory floors. In...
Manual palletizing might look simple. But behind every lift is a set of forces, postures, and risks...
When the biggest names in tech choose a tool, the industry takes notice. Recently, Robotiq Adaptive...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
When you think about automating a production line, it’s easy to imagine a major investment, a...
Some wins start with a product demo. Others start with a follow-up. This one started with a dry...
I just wrapped up a factory acceptance test (FAT) in Spain with a global player in the personal...
Founded in 1950, Caffè Corsini is an iconic name in Italian coffee, exporting to over 60 countries...
Every two years, Automatica brings together the brightest minds and boldest machines in...
When manufacturers think about return on investment, they often look at numbers tied to output:...
If your team stacks boxes all day, ergonomics shouldn’t be an afterthought; it should be the first...
"Is it under 20 pounds? Then it’s fine to lift." That myth has lived too long on factory floors. In...
Manual palletizing might look simple. But behind every lift is a set of forces, postures, and risks...
When the biggest names in tech choose a tool, the industry takes notice. Recently, Robotiq Adaptive...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
When you think about automating a production line, it’s easy to imagine a major investment, a...
Some wins start with a product demo. Others start with a follow-up. This one started with a dry...
I just wrapped up a factory acceptance test (FAT) in Spain with a global player in the personal...
Founded in 1950, Caffè Corsini is an iconic name in Italian coffee, exporting to over 60 countries...
Every two years, Automatica brings together the brightest minds and boldest machines in...
When manufacturers think about return on investment, they often look at numbers tied to output:...
If your team stacks boxes all day, ergonomics shouldn’t be an afterthought; it should be the first...
"Is it under 20 pounds? Then it’s fine to lift." That myth has lived too long on factory floors. In...
Manual palletizing might look simple. But behind every lift is a set of forces, postures, and risks...
When the biggest names in tech choose a tool, the industry takes notice. Recently, Robotiq Adaptive...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
When you think about automating a production line, it’s easy to imagine a major investment, a...
Some wins start with a product demo. Others start with a follow-up. This one started with a dry...
I just wrapped up a factory acceptance test (FAT) in Spain with a global player in the personal...
Founded in 1950, Caffè Corsini is an iconic name in Italian coffee, exporting to over 60 countries...
Every two years, Automatica brings together the brightest minds and boldest machines in...
When manufacturers think about return on investment, they often look at numbers tied to output:...
If your team stacks boxes all day, ergonomics shouldn’t be an afterthought; it should be the first...
"Is it under 20 pounds? Then it’s fine to lift." That myth has lived too long on factory floors. In...
Manual palletizing might look simple. But behind every lift is a set of forces, postures, and risks...
When the biggest names in tech choose a tool, the industry takes notice. Recently, Robotiq Adaptive...
| Maximum air supply | 6.2 bar (90 PSI) |
|---|---|
| Air flow (full speed) | 450 l/min |
| Pad diameter | 127 mm (5 in.) |
| Media | Hook and loop; 5 holes |
| Orbit diameter | 4.8 mm (3/16 in.) |
| Maximum speed | 12,000 RPM |
| Air supply inlet | 1/4-inch NPT thread |
| Dust exhaust | Central vacuum ready; 25-mm (1-in.) diameter |
| Tooling weight | 0.42 kg (1 lb) |
| Added height | 9 mm (0.35 in.) |
| Compatible sanders | Dynabrade 56854B, 56819B, 56830B, 56863B, 56844B, 57404B, 57814B |
| Grits | 60, 80, 120, 320, 400 |
| Cobot compatibility | Universal Robots |
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
When you think about automating a production line, it’s easy to imagine a major investment, a...
Some wins start with a product demo. Others start with a follow-up. This one started with a dry...
I just wrapped up a factory acceptance test (FAT) in Spain with a global player in the personal...
Founded in 1950, Caffè Corsini is an iconic name in Italian coffee, exporting to over 60 countries...
Every two years, Automatica brings together the brightest minds and boldest machines in...
When manufacturers think about return on investment, they often look at numbers tied to output:...
If your team stacks boxes all day, ergonomics shouldn’t be an afterthought; it should be the first...
"Is it under 20 pounds? Then it’s fine to lift." That myth has lived too long on factory floors. In...
Manual palletizing might look simple. But behind every lift is a set of forces, postures, and risks...
When the biggest names in tech choose a tool, the industry takes notice. Recently, Robotiq Adaptive...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
See how the 2-Finger Adaptive Robot Gripper helped triple Voodoo Manufacturing's 3D printing production
The ROI was a slam dunk from the beginning, from how much labor it saved. The installation process was the smoothest install of any piece of equipment I have had to experience in 28 years.
Vice-President, Cascade
coffee

Norem ipsum dolor sit amet, consectetur adipiscing elit. Etiam eu turpis molestie, dictum est a, mattis tellus. Sed dignissim, metus nec fringilla accumsan, risus sem sollicitudin lacus, ut interdum tellus elit sed risus. Maecenas eget condimentum velit, sit amet feugiat lectus.
Class aptent taciti sociosqu ad litora torquent per conubia nostra, per inceptos himenaeos. Praesent auctor purus luctus enim egestas, ac scelerisque ante pulvinar.
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
|---|---|---|---|
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
-modified.png?width=350&height=350&name=fc7803907d3b0b85e9399396796ef3e5b22dd116072b1d30723ceed35be168db%20(1)-modified.png)







.png?width=257&height=171&name=Frame%2011%20(3).png)
