%20(2).jpg)
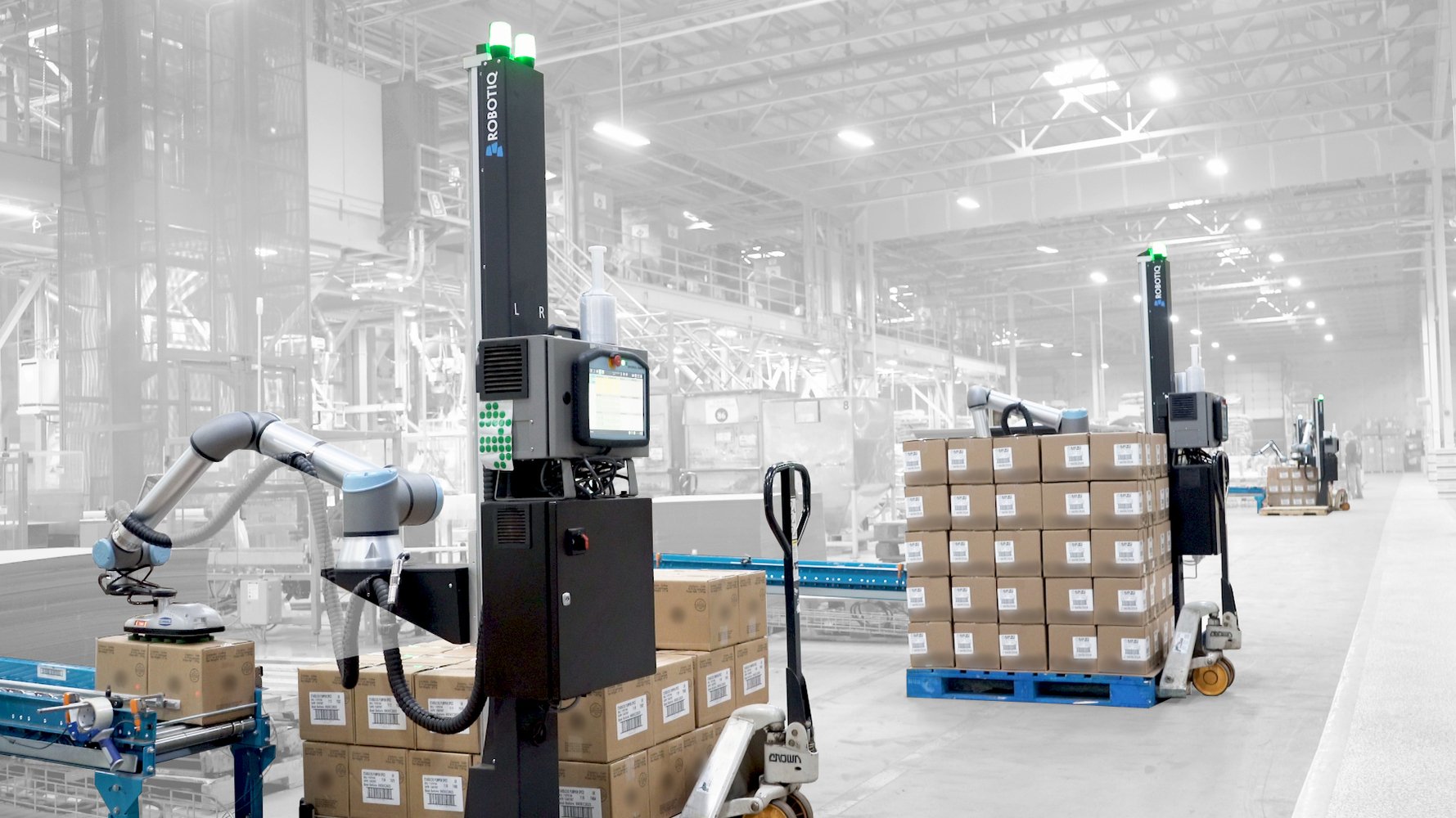
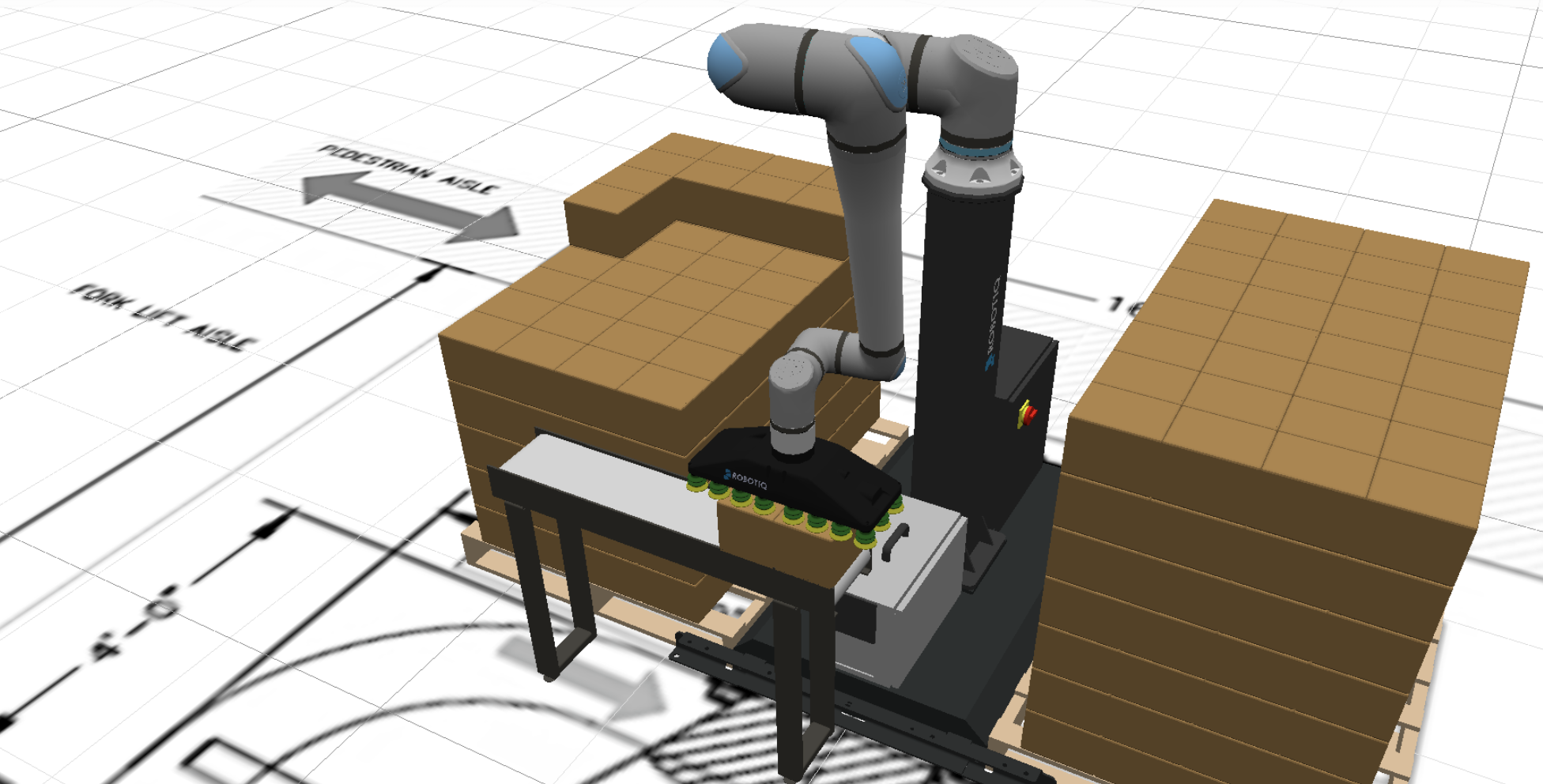
Palettisation
Plongez dans le monde de l'automatisation sans tracas. En quelques minutes de configuration, obtenez des actions robotiques immédiates. Expertise en robotique ? Non requise !
Plus
Alimentation des machines
Optimisez la productivité et assurez le fonctionnement continu de vos machines avec un minimum d'arrêt, vous apportant tranquillité d'esprit.
Plus
Vissage
Obtenez précision et fiabilité dans chaque tâche, simplifiant même les processus d'assemblage de petites vis les plus complexes avec une efficacité inégalée.
Plus




Comment Glenhaven s'est adapté avec la solution de palettisation et les services d'installation de Robotiq pour leur manufacture de repas prêts à cuire.
Découvrez comment Glenhaven a optimisé ses opérations, réduit sa dépendance à la main-d'œuvre et établi les bases d'une croissance continue en mettant en œuvre la solution de palettisation PE20 de Robotiq.
La simplicité du cobot pour les utilisateurs était une chose qui m'attirait, ainsi que sa convivialité.


La société familiale Deanan Gourmet Popcorn accroît ses opérations grâce à la solution de palettisation Robotiq.
Découvrez comment Deanan Gourmet Popcorn a eu un impact minimal sur leur aménagement actuel, avec une installation rapide et une évolutivité grâce à la solution de palettisation Robotiq.
Il n'y a pas de grande cage autour, et l'empreinte est tellement petite; comme la moitié d'une palette, et c'est mobile. Ces deux éléments m'ont convaincu immédiatement. En plus, c'est le tiers du budget que toutes les autres entreprises de robots avaient proposé.


Eckerts GmbH améliore sa productivité tout en garantissant une production de spiritueux de qualité supérieure
Découvrez comment cette solution gère désormais la manipulation des cartons fragiles, en réduisant le travail manuel et en créant un flux de travail plus sûr et plus efficace pour les employés.
Cette solution est l'une des meilleures choses que nous ayons achetées ces dernières années. Le système fonctionne parfaitement depuis le premier jour.


Raumland GmbH améliore son efficacité tout en maintenant une production de vin de haute qualité
Découvrez comment cette solution traite désormais plus de 5 millions de bouteilles et 2 500 variétés de vin par an, en soulageant les employés du travail manuel.
Le cobot correspond parfaitement à nos besoins. C'est une machine flexible, compacte, rapide à mettre en place et, au final, abordable. Nous avons pu automatiser une tâche qui était extrêmement fastidieuse. Plus personne ne se plaint de maux de dos. Du moins, pas à cause de la palettisation.


Hack AG a transformé ses opérations de palettisation en un système plus efficace, plus adaptable et plus convivial.
Découvrez comment la Solution de Palettisation Robotiq gère 800 UGS et se déplace entre les lignes en un peu plus de 8 minutes.
Le principal résultat pour notre processus de production est que nous sommes désormais plus flexibles dans nos processus et dans la planification de nos produits, et que nous diminuons le travail acharné de nos employés.


Découvrez les applications réelles de Robotiq
Comment Cascade Coffee a amélioré la sécurité, la performance et la satisfaction des employés en utilisant la solution de palettisation de Robotiq.
Le ROI était évident dès le début, grâce à la quantité de travail économisé. Le processus d'installation a été le plus fluide de tous les équipements que j'ai eu à installer en 28 ans.