
In 2016, I said something that went against where robotics was heading at the time: vision alone...

MAXIMALE NUTZLAST
IP-KLASSIFIZIERUNG
HUB

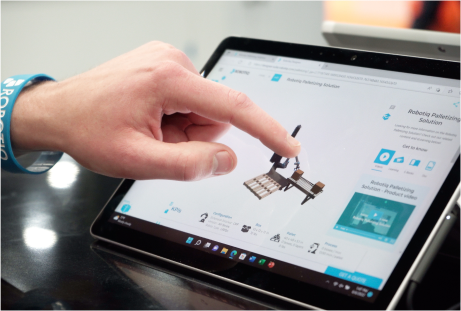
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
In 2016, I said something that went against where robotics was heading at the time: vision alone...

Medra Lab 001 is the largest autonomous AI-driven laboratory in the United States, operating...

Pharmaceutical manufacturers are under pressure to increase output, maintain strict compliance, and...
Physical AI is advancing quickly. AI models can now recognize objects, plan actions, and adapt to...

Artificial intelligence has made impressive progress. Models can classify images, generate text,...

TIDI Products, a global manufacturer of infection prevention and patient safety products,...

Physical AI is evolving quickly. From imitation learning to foundation models, robotics teams are...

Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...

Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...

Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day

Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
In 2016, I said something that went against where robotics was heading at the time: vision alone...
Medra Lab 001 is the largest autonomous AI-driven laboratory in the United States, operating...
Pharmaceutical manufacturers are under pressure to increase output, maintain strict compliance, and...
Physical AI is advancing quickly. AI models can now recognize objects, plan actions, and adapt to...
Artificial intelligence has made impressive progress. Models can classify images, generate text,...
TIDI Products, a global manufacturer of infection prevention and patient safety products,...
Physical AI is evolving quickly. From imitation learning to foundation models, robotics teams are...
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Mit dem Hand-E-Greifer von Robotiq kann der Benutzer die Kontrolle übernehmen. Eine einfache Konfiguration mit minimalen Programmieränderungen ist alles, was für Umstellungen erforderlich ist. Durch die Verwendung eines einzigen Greifers für mehrere Aufgaben können Hersteller Zeit und Geld sparen.



Robotiq has a variety of technical information available for your solution.
In 2016, I said something that went against where robotics was heading at the time: vision alone...
Medra Lab 001 is the largest autonomous AI-driven laboratory in the United States, operating...
Pharmaceutical manufacturers are under pressure to increase output, maintain strict compliance, and...
Physical AI is advancing quickly. AI models can now recognize objects, plan actions, and adapt to...
Artificial intelligence has made impressive progress. Models can classify images, generate text,...
TIDI Products, a global manufacturer of infection prevention and patient safety products,...
Physical AI is evolving quickly. From imitation learning to foundation models, robotics teams are...
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
In 2016, I said something that went against where robotics was heading at the time: vision alone...
Medra Lab 001 is the largest autonomous AI-driven laboratory in the United States, operating...
Pharmaceutical manufacturers are under pressure to increase output, maintain strict compliance, and...
Physical AI is advancing quickly. AI models can now recognize objects, plan actions, and adapt to...
Artificial intelligence has made impressive progress. Models can classify images, generate text,...
TIDI Products, a global manufacturer of infection prevention and patient safety products,...
Physical AI is evolving quickly. From imitation learning to foundation models, robotics teams are...
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Was die Greifer von Robotiq zu bieten haben, übertrifft alles, was die Konkurrenz zu bieten hat.

Leiter der Fertigungstechnik, Usinatech
Wir können die Greifer direkt an das Handgelenk des Roboters anschließen, erhalten eine Rückmeldung über die Position und die Kraft und können überprüfen, ob ein Teil da ist, wo eines sein sollte - und ob es das richtige Teil ist.

F&E-Leiter, Fusion OEM
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
In 2016, I said something that went against where robotics was heading at the time: vision alone...
Medra Lab 001 is the largest autonomous AI-driven laboratory in the United States, operating...
Pharmaceutical manufacturers are under pressure to increase output, maintain strict compliance, and...
Physical AI is advancing quickly. AI models can now recognize objects, plan actions, and adapt to...
Artificial intelligence has made impressive progress. Models can classify images, generate text,...
TIDI Products, a global manufacturer of infection prevention and patient safety products,...
Physical AI is evolving quickly. From imitation learning to foundation models, robotics teams are...
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
In 2016, I said something that went against where robotics was heading at the time: vision alone...
Medra Lab 001 is the largest autonomous AI-driven laboratory in the United States, operating...
Pharmaceutical manufacturers are under pressure to increase output, maintain strict compliance, and...
Physical AI is advancing quickly. AI models can now recognize objects, plan actions, and adapt to...
Artificial intelligence has made impressive progress. Models can classify images, generate text,...
TIDI Products, a global manufacturer of infection prevention and patient safety products,...
Physical AI is evolving quickly. From imitation learning to foundation models, robotics teams are...
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
| Nutzlast | 7 kg (15 lb) |
|---|---|
| Gewicht des Werkzeugs | 1 kg (2 lb) |
| Energiequelle | Elektrizität, angeschlossen an das Handgelenk des Roboters (24 V, 2 A) |
| Kontrollierte Parameter | Objekterkennung, Position, Geschwindigkeit und Kraft |
| Gewährleistung | 5 000 000 Zyklen |
| HUB | 50 mm (2 in.) |
| Greifkraft | 20 bis 185 N (4,5 bis 41 lbf) |
| Schließgeschwindigkeit | 150 mm/s (5,9 in./s) |
| Reproduzierbarkeit | 0,025 mm (0,001 in.) |
| Schutzart (IP) Schutzart (IP) Schutzart (IP) | IP67 |
| Betriebstemperatur | -10 bis 50 °C (14 bis 122 °F) |
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
In 2016, I said something that went against where robotics was heading at the time: vision alone...
Medra Lab 001 is the largest autonomous AI-driven laboratory in the United States, operating...
Pharmaceutical manufacturers are under pressure to increase output, maintain strict compliance, and...
Physical AI is advancing quickly. AI models can now recognize objects, plan actions, and adapt to...
Artificial intelligence has made impressive progress. Models can classify images, generate text,...
TIDI Products, a global manufacturer of infection prevention and patient safety products,...
Physical AI is evolving quickly. From imitation learning to foundation models, robotics teams are...
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
See how the 2-Finger Adaptive Robot Gripper helped triple Voodoo Manufacturing's 3D printing production
The ROI was a slam dunk from the beginning, from how much labor it saved. The installation process was the smoothest install of any piece of equipment I have had to experience in 28 years.
Vice-President, Cascade
coffee

Norem ipsum dolor sit amet, consectetur adipiscing elit. Etiam eu turpis molestie, dictum est a, mattis tellus. Sed dignissim, metus nec fringilla accumsan, risus sem sollicitudin lacus, ut interdum tellus elit sed risus. Maecenas eget condimentum velit, sit amet feugiat lectus.
Class aptent taciti sociosqu ad litora torquent per conubia nostra, per inceptos himenaeos. Praesent auctor purus luctus enim egestas, ac scelerisque ante pulvinar.
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
|---|---|---|---|
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
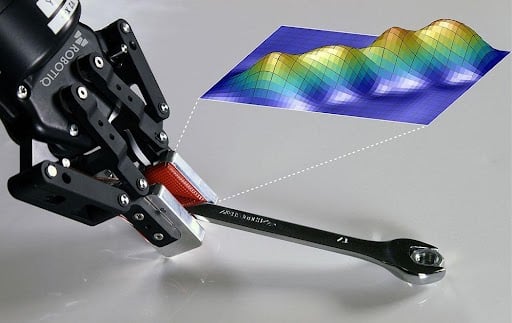
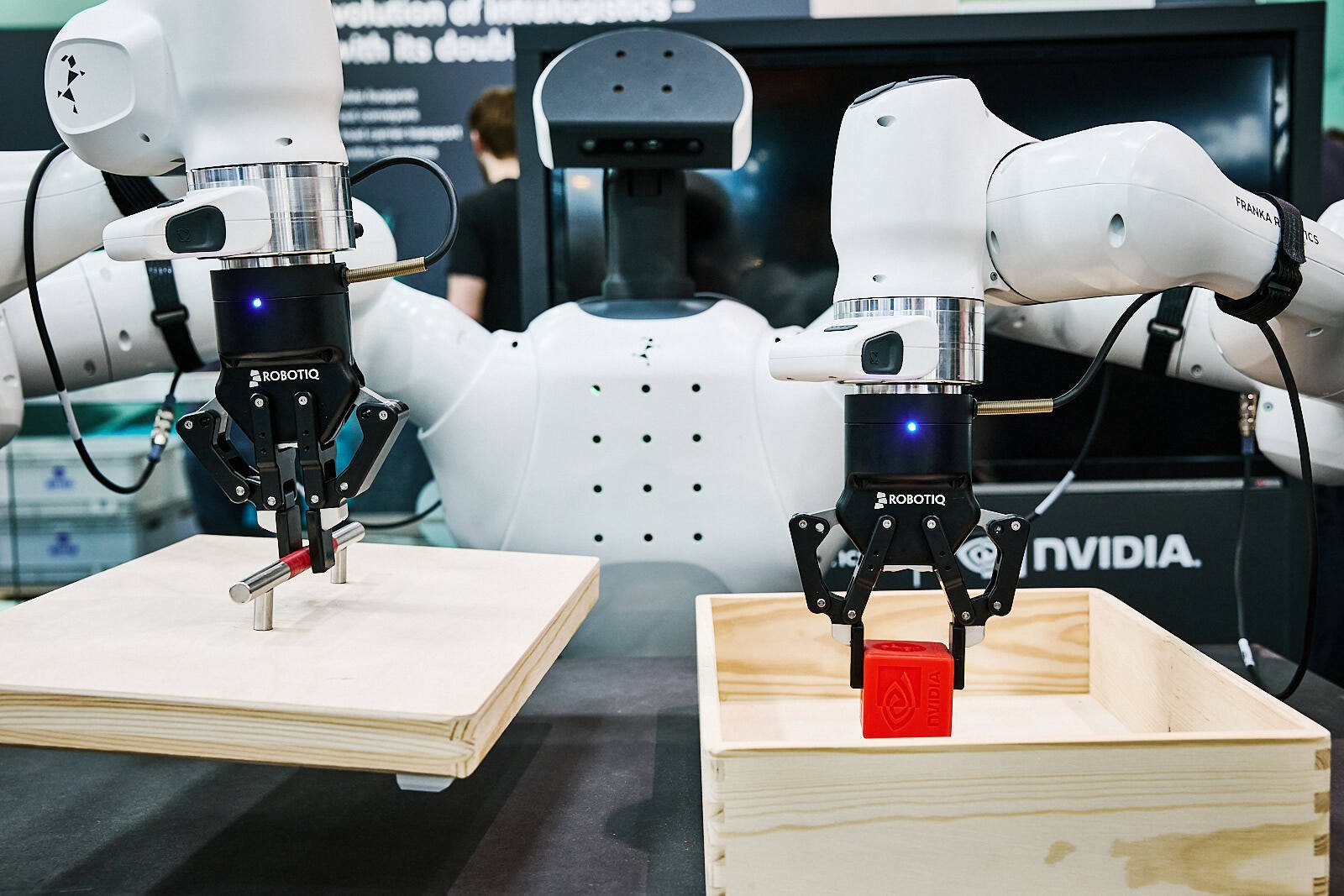
Adaptive Greifer von Robotiq haben sich als Standard in der Robotikforschung etabliert und werden weltweit in Laboren für lernbasierte Manipulation und die Entwicklung Physischer KI eingesetzt. Ihre Verfügbarkeit, der technische Support und das umfassende Integrations-Ökosystem machen sie zur bevorzugten Manipulationsplattform für Teams, die auf schnelle Experimente und effiziente Datenerfassung fokussiert sind. Dank schneller Inbetriebnahme, zuverlässiger Flottenintegration und direktem Zugriff auf die Steuerung ermöglichen Robotiq-Greifer Ingenieur:innen, sich auf den Aufbau von Intelligenz und realen Anwendungen zu konzentrieren – statt auf die Entwicklung kundenspezifischer Hardware.
Adaptive Greifer von Robotiq haben sich als Standard in der Robotikforschung etabliert und werden weltweit in Laboren für lernbasierte Manipulation und die Entwicklung Physischer KI eingesetzt. Ihre Verfügbarkeit, der technische Support und das umfassende Integrations-Ökosystem machen sie zur bevorzugten Manipulationsplattform für Teams, die auf schnelle Experimente und effiziente Datenerfassung fokussiert sind. Dank schneller Inbetriebnahme, zuverlässiger Flottenintegration und direktem Zugriff auf die Steuerung ermöglichen Robotiq-Greifer Ingenieur:innen, sich auf den Aufbau von Intelligenz und realen Anwendungen zu konzentrieren – statt auf die Entwicklung kundenspezifischer Hardware.

Hohe Verfügbarkeit (Uptime): Zuverlässige Manipulation in unvorhersehbaren Umgebungen
Konsistent im großen Maßstab: Bewährte, zuverlässige und robuste Hardware
Flexible Integration in KI-Pipelines
90 % der Aufgaben bei 10 % der Kosten
Über 23.000 verkaufte Greifer weltweit
Präzise Erfassung von Öffnungs-/Schließposition, Kraft und Geschwindigkeit für mehr Daten
Standardisierte Kommunikationsprotokolle
Garantie für 5.000.000 Zyklen
ROS 2-Pakete und Integration in das NVIDIA-Isaac-Sim-Ökosystem
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
In 2016, I said something that went against where robotics was heading at the time: vision alone...
Medra Lab 001 is the largest autonomous AI-driven laboratory in the United States, operating...
Pharmaceutical manufacturers are under pressure to increase output, maintain strict compliance, and...
Physical AI is advancing quickly. AI models can now recognize objects, plan actions, and adapt to...
Artificial intelligence has made impressive progress. Models can classify images, generate text,...
TIDI Products, a global manufacturer of infection prevention and patient safety products,...
Physical AI is evolving quickly. From imitation learning to foundation models, robotics teams are...
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
See how the 2-Finger Adaptive Robot Gripper helped triple Voodoo Manufacturing's 3D printing production
The ROI was a slam dunk from the beginning, from how much labor it saved. The installation process was the smoothest install of any piece of equipment I have had to experience in 28 years.
Vice-President, Cascade
coffee
Norem ipsum dolor sit amet, consectetur adipiscing elit. Etiam eu turpis molestie, dictum est a, mattis tellus. Sed dignissim, metus nec fringilla accumsan, risus sem sollicitudin lacus, ut interdum tellus elit sed risus. Maecenas eget condimentum velit, sit amet feugiat lectus.
Class aptent taciti sociosqu ad litora torquent per conubia nostra, per inceptos himenaeos. Praesent auctor purus luctus enim egestas, ac scelerisque ante pulvinar.
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
|---|---|---|---|
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
MAXIMALE NUTZLAST
SCHLIEßKRAFT
HUB
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
In 2016, I said something that went against where robotics was heading at the time: vision alone...
Medra Lab 001 is the largest autonomous AI-driven laboratory in the United States, operating...
Pharmaceutical manufacturers are under pressure to increase output, maintain strict compliance, and...
Physical AI is advancing quickly. AI models can now recognize objects, plan actions, and adapt to...
Artificial intelligence has made impressive progress. Models can classify images, generate text,...
TIDI Products, a global manufacturer of infection prevention and patient safety products,...
Physical AI is evolving quickly. From imitation learning to foundation models, robotics teams are...
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
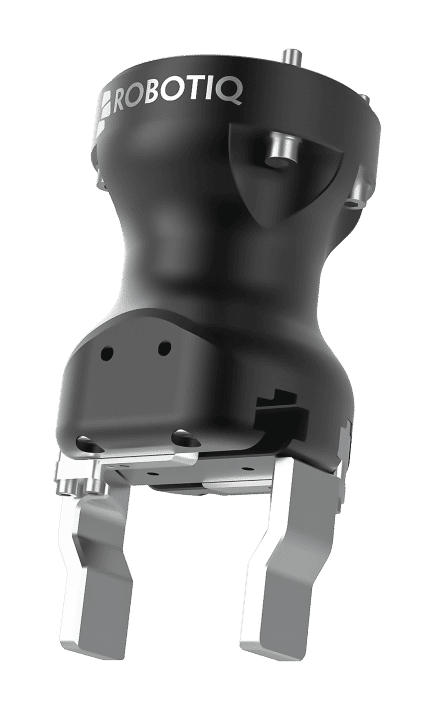
Die 2-Finger-Greifer von Robotiq vereinen Präzision, Effizienz und Vielseitigkeit zur Optimierung der Handhabung in der Fertigung. Ihre nahtlose Integration und intelligenten Steuerungsfunktionen steigern die Produktivität und reduzieren Ausfallzeiten. Sie sind langlebig und wartungsarm und eignen sich für eine Vielzahl von Anwendungen, bei denen sie die betriebliche Effizienz erheblich steigern.

Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
In 2016, I said something that went against where robotics was heading at the time: vision alone...
Medra Lab 001 is the largest autonomous AI-driven laboratory in the United States, operating...
Pharmaceutical manufacturers are under pressure to increase output, maintain strict compliance, and...
Physical AI is advancing quickly. AI models can now recognize objects, plan actions, and adapt to...
Artificial intelligence has made impressive progress. Models can classify images, generate text,...
TIDI Products, a global manufacturer of infection prevention and patient safety products,...
Physical AI is evolving quickly. From imitation learning to foundation models, robotics teams are...
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
In 2016, I said something that went against where robotics was heading at the time: vision alone...
Medra Lab 001 is the largest autonomous AI-driven laboratory in the United States, operating...
Pharmaceutical manufacturers are under pressure to increase output, maintain strict compliance, and...
Physical AI is advancing quickly. AI models can now recognize objects, plan actions, and adapt to...
Artificial intelligence has made impressive progress. Models can classify images, generate text,...
TIDI Products, a global manufacturer of infection prevention and patient safety products,...
Physical AI is evolving quickly. From imitation learning to foundation models, robotics teams are...
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Sie wirken für Ihre Kunden, als wären Sie auf dem neuesten Stand der Technik.

Präsident, Walt Machine Inc.
Robotiq verfügt über eine einzigartige Lösung: einen zuverlässigen Greifer, der einen schnellen Teilewechsel ermöglicht, was für unsere Produktion mit hohem Mix und hohem Volumen wichtig ist.

Fertigungsingenieur, Sennheiser Manufacturing USA
Der 2F-85 ist sehr intuitiv in Bezug auf Kraft, Öffnung und Aktivierung. [...] Für alles, was mit Pick-and-Place zu tun hat, können Sie die Fingerspitzen so anbringen, wie Sie möchten.

Direktor für kontinuierliche Verbesserung, APN
Wir brauchten einen sehr flexiblen Greifer, mit dem wir die Kraft und den Abstand zwischen zwei Punkten leicht überwachen konnten. Der 2F-85 war eine offensichtliche Wahl.

Geschäftsführer, KPE Engineering, Diehl
Ich hatte keine besonderen Programmierkenntnisse, aber mit ein paar logischen Kenntnissen war es sehr einfach, den Roboter, den adaptiven 2-Finger-Greifer und die Handgelenkkamera zu programmieren.

Vizepräsidentin, Cascade
Mechanischer Entwicklungsingenieur, Assa Abloy
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
In 2016, I said something that went against where robotics was heading at the time: vision alone...
Medra Lab 001 is the largest autonomous AI-driven laboratory in the United States, operating...
Pharmaceutical manufacturers are under pressure to increase output, maintain strict compliance, and...
Physical AI is advancing quickly. AI models can now recognize objects, plan actions, and adapt to...
Artificial intelligence has made impressive progress. Models can classify images, generate text,...
TIDI Products, a global manufacturer of infection prevention and patient safety products,...
Physical AI is evolving quickly. From imitation learning to foundation models, robotics teams are...
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
In 2016, I said something that went against where robotics was heading at the time: vision alone...
Medra Lab 001 is the largest autonomous AI-driven laboratory in the United States, operating...
Pharmaceutical manufacturers are under pressure to increase output, maintain strict compliance, and...
Physical AI is advancing quickly. AI models can now recognize objects, plan actions, and adapt to...
Artificial intelligence has made impressive progress. Models can classify images, generate text,...
TIDI Products, a global manufacturer of infection prevention and patient safety products,...
Physical AI is evolving quickly. From imitation learning to foundation models, robotics teams are...
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
| Nutzlast | 5 kg (11 lb) |
|---|---|
| Gewicht des Werkzeugs | 1 kg (2 lb) |
| Energiequelle | Elektrizität, angeschlossen an das Handgelenk des Roboters (24 V, 2 A) |
| Kontrollierte Parameter | Objekterkennung, Position, Geschwindigkeit und Kraft |
| Gewährleistung | 2 000 000 Zyklen |
| HUB | 85 mm (3,3 in.) |
| Greifkraft | 20 bis 235 N (4,5 bis 50 lbf) |
| Schließgeschwindigkeit | 20 bis 150 mm/s (0,8 bis 5,9 in./s) |
| Reproduzierbarkeit | 0.05 mm (0.002 in) |
| Schutzart (IP) | IP40 |
| Betriebstemperatur | -10 bis 50 °C (14 bis 122 °F) |
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
In 2016, I said something that went against where robotics was heading at the time: vision alone...
Medra Lab 001 is the largest autonomous AI-driven laboratory in the United States, operating...
Pharmaceutical manufacturers are under pressure to increase output, maintain strict compliance, and...
Physical AI is advancing quickly. AI models can now recognize objects, plan actions, and adapt to...
Artificial intelligence has made impressive progress. Models can classify images, generate text,...
TIDI Products, a global manufacturer of infection prevention and patient safety products,...
Physical AI is evolving quickly. From imitation learning to foundation models, robotics teams are...
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
| Nutzlast | 2,5 kg (5,5 lb) |
|---|---|
| Gewicht des Werkzeugs | 1 kg (2 lb) |
| Energiequelle | Elektrizität, angeschlossen an das Handgelenk des Roboters (24 V, 2 A) |
| Kontrollierte Parameter | Objekterkennung, Position, Geschwindigkeit und Kraft |
| Gewährleistung | 2 000 000 Zyklen |
| HUB | 140 mm (5,5 in.) |
| Greifkraft | 10 bis 125 N (2 bis 25 lbf) |
| Schließgeschwindigkeit | 30 bis 250 mm/s (1,2 bis 9,8 in./s) |
| Reproduzierbarkeit | 0.08 mm (0.003 in) |
| Schutzart (IP) | IP40 |
| Betriebstemperatur | -10 bis 50 °C (14 bis 122 °F) |
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
In 2016, I said something that went against where robotics was heading at the time: vision alone...
Medra Lab 001 is the largest autonomous AI-driven laboratory in the United States, operating...
Pharmaceutical manufacturers are under pressure to increase output, maintain strict compliance, and...
Physical AI is advancing quickly. AI models can now recognize objects, plan actions, and adapt to...
Artificial intelligence has made impressive progress. Models can classify images, generate text,...
TIDI Products, a global manufacturer of infection prevention and patient safety products,...
Physical AI is evolving quickly. From imitation learning to foundation models, robotics teams are...
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
See how the 2-Finger Adaptive Robot Gripper helped triple Voodoo Manufacturing's 3D printing production
The ROI was a slam dunk from the beginning, from how much labor it saved. The installation process was the smoothest install of any piece of equipment I have had to experience in 28 years.
Vice-President, Cascade
coffee
Norem ipsum dolor sit amet, consectetur adipiscing elit. Etiam eu turpis molestie, dictum est a, mattis tellus. Sed dignissim, metus nec fringilla accumsan, risus sem sollicitudin lacus, ut interdum tellus elit sed risus. Maecenas eget condimentum velit, sit amet feugiat lectus.
Class aptent taciti sociosqu ad litora torquent per conubia nostra, per inceptos himenaeos. Praesent auctor purus luctus enim egestas, ac scelerisque ante pulvinar.
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
|---|---|---|---|
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Adaptive Greifer von Robotiq haben sich als Standard in der Robotikforschung etabliert und werden weltweit in Laboren für lernbasierte Manipulation und die Entwicklung Physischer KI eingesetzt. Ihre Verfügbarkeit, der technische Support und das umfassende Integrations-Ökosystem machen sie zur bevorzugten Manipulationsplattform für Teams, die auf schnelle Experimente und effiziente Datenerfassung fokussiert sind. Dank schneller Inbetriebnahme, zuverlässiger Flottenintegration und direktem Zugriff auf die Steuerung ermöglichen Robotiq-Greifer Ingenieur:innen, sich auf den Aufbau von Intelligenz und realen Anwendungen zu konzentrieren – statt auf die Entwicklung kundenspezifischer Hardware.

Hohe Verfügbarkeit (Uptime): Zuverlässige Manipulation in unvorhersehbaren Umgebungen
Konsistent im großen Maßstab: Bewährte, zuverlässige und robuste Hardware
Flexible Integration in KI-Pipelines
90 % der Aufgaben bei 10 % der Kosten
Die 2-Finger-Greifer von Robotiq vereinen Präzision, Effizienz und Vielseitigkeit zur Optimierung der Handhabung in der Fertigung. Ihre nahtlose Integration und intelligenten Steuerungsfunktionen steigern die Produktivität und reduzieren Ausfallzeiten. Sie sind langlebig und wartungsarm und eignen sich für eine Vielzahl von Anwendungen, bei denen sie die betriebliche Effizienz erheblich steigern.



Robotiq has a variety of technical information available for your solution.
In 2016, I said something that went against where robotics was heading at the time: vision alone...
Medra Lab 001 is the largest autonomous AI-driven laboratory in the United States, operating...
Pharmaceutical manufacturers are under pressure to increase output, maintain strict compliance, and...
Physical AI is advancing quickly. AI models can now recognize objects, plan actions, and adapt to...
Artificial intelligence has made impressive progress. Models can classify images, generate text,...
TIDI Products, a global manufacturer of infection prevention and patient safety products,...
Physical AI is evolving quickly. From imitation learning to foundation models, robotics teams are...
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
MAXIMALE NUTZLAST
IP-KLASSIFIZIERUNG
HUB (DURCHMESSER)



Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
In 2016, I said something that went against where robotics was heading at the time: vision alone...
Medra Lab 001 is the largest autonomous AI-driven laboratory in the United States, operating...
Pharmaceutical manufacturers are under pressure to increase output, maintain strict compliance, and...
Physical AI is advancing quickly. AI models can now recognize objects, plan actions, and adapt to...
Artificial intelligence has made impressive progress. Models can classify images, generate text,...
TIDI Products, a global manufacturer of infection prevention and patient safety products,...
Physical AI is evolving quickly. From imitation learning to foundation models, robotics teams are...
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day

Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
In 2016, I said something that went against where robotics was heading at the time: vision alone...
Medra Lab 001 is the largest autonomous AI-driven laboratory in the United States, operating...
Pharmaceutical manufacturers are under pressure to increase output, maintain strict compliance, and...
Physical AI is advancing quickly. AI models can now recognize objects, plan actions, and adapt to...
Artificial intelligence has made impressive progress. Models can classify images, generate text,...
TIDI Products, a global manufacturer of infection prevention and patient safety products,...
Physical AI is evolving quickly. From imitation learning to foundation models, robotics teams are...
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Mit dem Hand-E-Greifer von Robotiq kann der Benutzer die Kontrolle übernehmen. Eine einfache Konfiguration mit minimalen Programmieränderungen ist alles, was für Umstellungen erforderlich ist. Durch die Verwendung eines einzigen Greifers für mehrere Aufgaben können Hersteller Zeit und Geld sparen.

Robotiq has a variety of technical information available for your solution.
In 2016, I said something that went against where robotics was heading at the time: vision alone...
Medra Lab 001 is the largest autonomous AI-driven laboratory in the United States, operating...
Pharmaceutical manufacturers are under pressure to increase output, maintain strict compliance, and...
Physical AI is advancing quickly. AI models can now recognize objects, plan actions, and adapt to...
Artificial intelligence has made impressive progress. Models can classify images, generate text,...
TIDI Products, a global manufacturer of infection prevention and patient safety products,...
Physical AI is evolving quickly. From imitation learning to foundation models, robotics teams are...
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
In 2016, I said something that went against where robotics was heading at the time: vision alone...
Medra Lab 001 is the largest autonomous AI-driven laboratory in the United States, operating...
Pharmaceutical manufacturers are under pressure to increase output, maintain strict compliance, and...
Physical AI is advancing quickly. AI models can now recognize objects, plan actions, and adapt to...
Artificial intelligence has made impressive progress. Models can classify images, generate text,...
TIDI Products, a global manufacturer of infection prevention and patient safety products,...
Physical AI is evolving quickly. From imitation learning to foundation models, robotics teams are...
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Was die Greifer von Robotiq zu bieten haben, übertrifft alles, was die Konkurrenz zu bieten hat.
Leiter der Fertigungstechnik, Usinatech
Wir können die Greifer direkt an das Handgelenk des Roboters anschließen, erhalten eine Rückmeldung über die Position und die Kraft und können überprüfen, ob ein Teil da ist, wo eines sein sollte - und ob es das richtige Teil ist.
F&E-Leiter, Fusion OEM
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
In 2016, I said something that went against where robotics was heading at the time: vision alone...
Medra Lab 001 is the largest autonomous AI-driven laboratory in the United States, operating...
Pharmaceutical manufacturers are under pressure to increase output, maintain strict compliance, and...
Physical AI is advancing quickly. AI models can now recognize objects, plan actions, and adapt to...
Artificial intelligence has made impressive progress. Models can classify images, generate text,...
TIDI Products, a global manufacturer of infection prevention and patient safety products,...
Physical AI is evolving quickly. From imitation learning to foundation models, robotics teams are...
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
In 2016, I said something that went against where robotics was heading at the time: vision alone...
Medra Lab 001 is the largest autonomous AI-driven laboratory in the United States, operating...
Pharmaceutical manufacturers are under pressure to increase output, maintain strict compliance, and...
Physical AI is advancing quickly. AI models can now recognize objects, plan actions, and adapt to...
Artificial intelligence has made impressive progress. Models can classify images, generate text,...
TIDI Products, a global manufacturer of infection prevention and patient safety products,...
Physical AI is evolving quickly. From imitation learning to foundation models, robotics teams are...
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
| Nutzlast | 10 kg (22 lb) |
|---|---|
| Gewicht des Werkzeugs | 1.695 kg (3.746 lb) |
| Energiequelle | Elektrizität, angeschlossen an das Handgelenk des Roboters (24 V, 2 A) |
| Kontrollierte Parameter | Objekterkennung, Position, Geschwindigkeit und Kraft |
| Gewährleistung | 5 000 000 Zyklen |
| HUB (DURCHMESSER) | 40 mm (1.57 in) |
| Greifkraft (Pro Finger) | 25N bis 175 N (5.6 bis 39.34 lbf) |
| Schließgeschwindigkeit | 150 mm/s (5,9 in/s) |
| Reproduzierbarkeit | 0,04 mm (0,002 in) |
| Schutzart (IP) Schutzart (IP) Schutzart (IP) | IP67 |
| Betriebstemperatur | -10 bis 50 °C (14 bis 122 °F) |
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
In 2016, I said something that went against where robotics was heading at the time: vision alone...
Medra Lab 001 is the largest autonomous AI-driven laboratory in the United States, operating...
Pharmaceutical manufacturers are under pressure to increase output, maintain strict compliance, and...
Physical AI is advancing quickly. AI models can now recognize objects, plan actions, and adapt to...
Artificial intelligence has made impressive progress. Models can classify images, generate text,...
TIDI Products, a global manufacturer of infection prevention and patient safety products,...
Physical AI is evolving quickly. From imitation learning to foundation models, robotics teams are...
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
See how the 2-Finger Adaptive Robot Gripper helped triple Voodoo Manufacturing's 3D printing production
The ROI was a slam dunk from the beginning, from how much labor it saved. The installation process was the smoothest install of any piece of equipment I have had to experience in 28 years.
Vice-President, Cascade
coffee
Norem ipsum dolor sit amet, consectetur adipiscing elit. Etiam eu turpis molestie, dictum est a, mattis tellus. Sed dignissim, metus nec fringilla accumsan, risus sem sollicitudin lacus, ut interdum tellus elit sed risus. Maecenas eget condimentum velit, sit amet feugiat lectus.
Class aptent taciti sociosqu ad litora torquent per conubia nostra, per inceptos himenaeos. Praesent auctor purus luctus enim egestas, ac scelerisque ante pulvinar.
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
|---|---|---|---|
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
MAXIMALE NUTZLAST
SCHLIEßKRAFT
HUB
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
In 2016, I said something that went against where robotics was heading at the time: vision alone...
Medra Lab 001 is the largest autonomous AI-driven laboratory in the United States, operating...
Pharmaceutical manufacturers are under pressure to increase output, maintain strict compliance, and...
Physical AI is advancing quickly. AI models can now recognize objects, plan actions, and adapt to...
Artificial intelligence has made impressive progress. Models can classify images, generate text,...
TIDI Products, a global manufacturer of infection prevention and patient safety products,...
Physical AI is evolving quickly. From imitation learning to foundation models, robotics teams are...
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day

Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
In 2016, I said something that went against where robotics was heading at the time: vision alone...
Medra Lab 001 is the largest autonomous AI-driven laboratory in the United States, operating...
Pharmaceutical manufacturers are under pressure to increase output, maintain strict compliance, and...
Physical AI is advancing quickly. AI models can now recognize objects, plan actions, and adapt to...
Artificial intelligence has made impressive progress. Models can classify images, generate text,...
TIDI Products, a global manufacturer of infection prevention and patient safety products,...
Physical AI is evolving quickly. From imitation learning to foundation models, robotics teams are...
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Der 3-Finger-Greifer ist eine perfekte Mischung aus Haltbarkeit, schneller Integration und vielseitiger Funktionalität. Seine robuste Konstruktion ist für die härtesten industriellen Anwendungen ausgelegt und bietet nahtlose Kompatibilität mit einer Reihe von Robotern. Unsere intuitive Programmierschnittstelle sorgt für eine schnelle Einrichtung, während die vielfältigen Greiffunktionen und die präzise Fingersteuerung eine breite Palette von Betriebsanforderungen erfüllen.



Robotiq has a variety of technical information available for your solution.
In 2016, I said something that went against where robotics was heading at the time: vision alone...
Medra Lab 001 is the largest autonomous AI-driven laboratory in the United States, operating...
Pharmaceutical manufacturers are under pressure to increase output, maintain strict compliance, and...
Physical AI is advancing quickly. AI models can now recognize objects, plan actions, and adapt to...
Artificial intelligence has made impressive progress. Models can classify images, generate text,...
TIDI Products, a global manufacturer of infection prevention and patient safety products,...
Physical AI is evolving quickly. From imitation learning to foundation models, robotics teams are...
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
In 2016, I said something that went against where robotics was heading at the time: vision alone...
Medra Lab 001 is the largest autonomous AI-driven laboratory in the United States, operating...
Pharmaceutical manufacturers are under pressure to increase output, maintain strict compliance, and...
Physical AI is advancing quickly. AI models can now recognize objects, plan actions, and adapt to...
Artificial intelligence has made impressive progress. Models can classify images, generate text,...
TIDI Products, a global manufacturer of infection prevention and patient safety products,...
Physical AI is evolving quickly. From imitation learning to foundation models, robotics teams are...
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
In 2016, I said something that went against where robotics was heading at the time: vision alone...
Medra Lab 001 is the largest autonomous AI-driven laboratory in the United States, operating...
Pharmaceutical manufacturers are under pressure to increase output, maintain strict compliance, and...
Physical AI is advancing quickly. AI models can now recognize objects, plan actions, and adapt to...
Artificial intelligence has made impressive progress. Models can classify images, generate text,...
TIDI Products, a global manufacturer of infection prevention and patient safety products,...
Physical AI is evolving quickly. From imitation learning to foundation models, robotics teams are...
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
| Nutzlast | 10 kg (22 lb) |
|---|---|
| Gewicht des Werkzeugs | 2.3 kg (5 lb) |
| Energiequelle | Elektrizität |
| Kontrollierte Parameter | Objekterkennung, Position, Geschwindigkeit und Kraft |
| HUB | 155 mm (6 in.) |
| Greifkraft | 30 to 70 N (6.7 to 15.7 lbf) |
| Schließgeschwindigkeit | 22 to 110 mm/s (0.9 in. to 4.3 in./s) |
| Reproduzierbarkeit | 0.05 mm (0.2 in.) |
| Betriebstemperatur | -10 to 50 °C (14 to 122 °F) |
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
In 2016, I said something that went against where robotics was heading at the time: vision alone...
Medra Lab 001 is the largest autonomous AI-driven laboratory in the United States, operating...
Pharmaceutical manufacturers are under pressure to increase output, maintain strict compliance, and...
Physical AI is advancing quickly. AI models can now recognize objects, plan actions, and adapt to...
Artificial intelligence has made impressive progress. Models can classify images, generate text,...
TIDI Products, a global manufacturer of infection prevention and patient safety products,...
Physical AI is evolving quickly. From imitation learning to foundation models, robotics teams are...
Across Italy and the DACH region, food manufacturers are facing the same reality: 📈 Increasing...
Martin Ray Winery, a historic wine producer based in California, modernized its bottling operations...
Artificial intelligence has brought enormous excitement to robotics. Robots can now walk, navigate...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
See how the 2-Finger Adaptive Robot Gripper helped triple Voodoo Manufacturing's 3D printing production
The ROI was a slam dunk from the beginning, from how much labor it saved. The installation process was the smoothest install of any piece of equipment I have had to experience in 28 years.
Vice-President, Cascade
coffee
Norem ipsum dolor sit amet, consectetur adipiscing elit. Etiam eu turpis molestie, dictum est a, mattis tellus. Sed dignissim, metus nec fringilla accumsan, risus sem sollicitudin lacus, ut interdum tellus elit sed risus. Maecenas eget condimentum velit, sit amet feugiat lectus.
Class aptent taciti sociosqu ad litora torquent per conubia nostra, per inceptos himenaeos. Praesent auctor purus luctus enim egestas, ac scelerisque ante pulvinar.
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
|---|---|---|---|
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |

















.png?width=257&height=171&name=Frame%2011%20(3).png)

.png?width=257&height=171&name=Frame%2011%20(2).png)