-1.jpeg?width=2000&name=2F85-Wrist-Camera-Machine-Tending-Walt-Machine-58%20(1)-1.jpeg)
ÉTUDES DE CAS
Walt Machine
L'évolution d'un atelier d'usinage
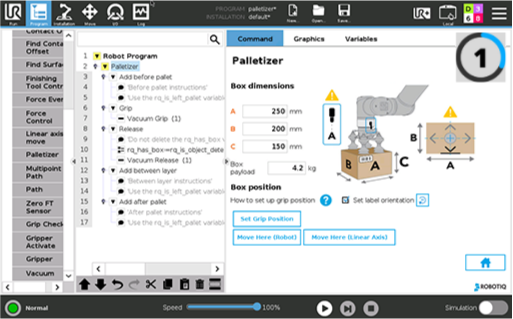
Step 1 - Box dimensions, weight and orientation
Step 1 - Box dimensions, weight and orientation
Step 1 - Box dimensions, weight and orientation

.jpg)