.jpeg?width=2000&name=2F85-Wrist-Camera-Machine-Tending-Walt-Machine-58%20(1).jpeg)
ロボティックの違い

生産性の向上
さらに詳しく
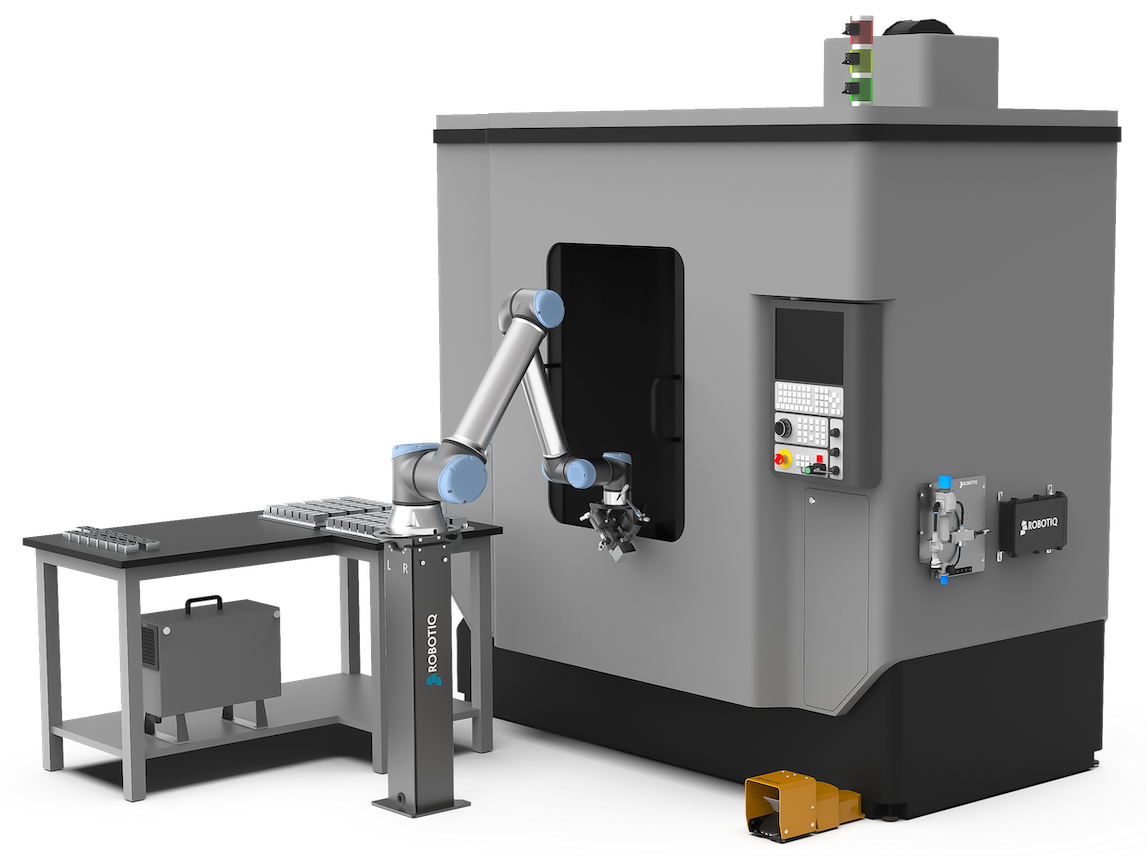
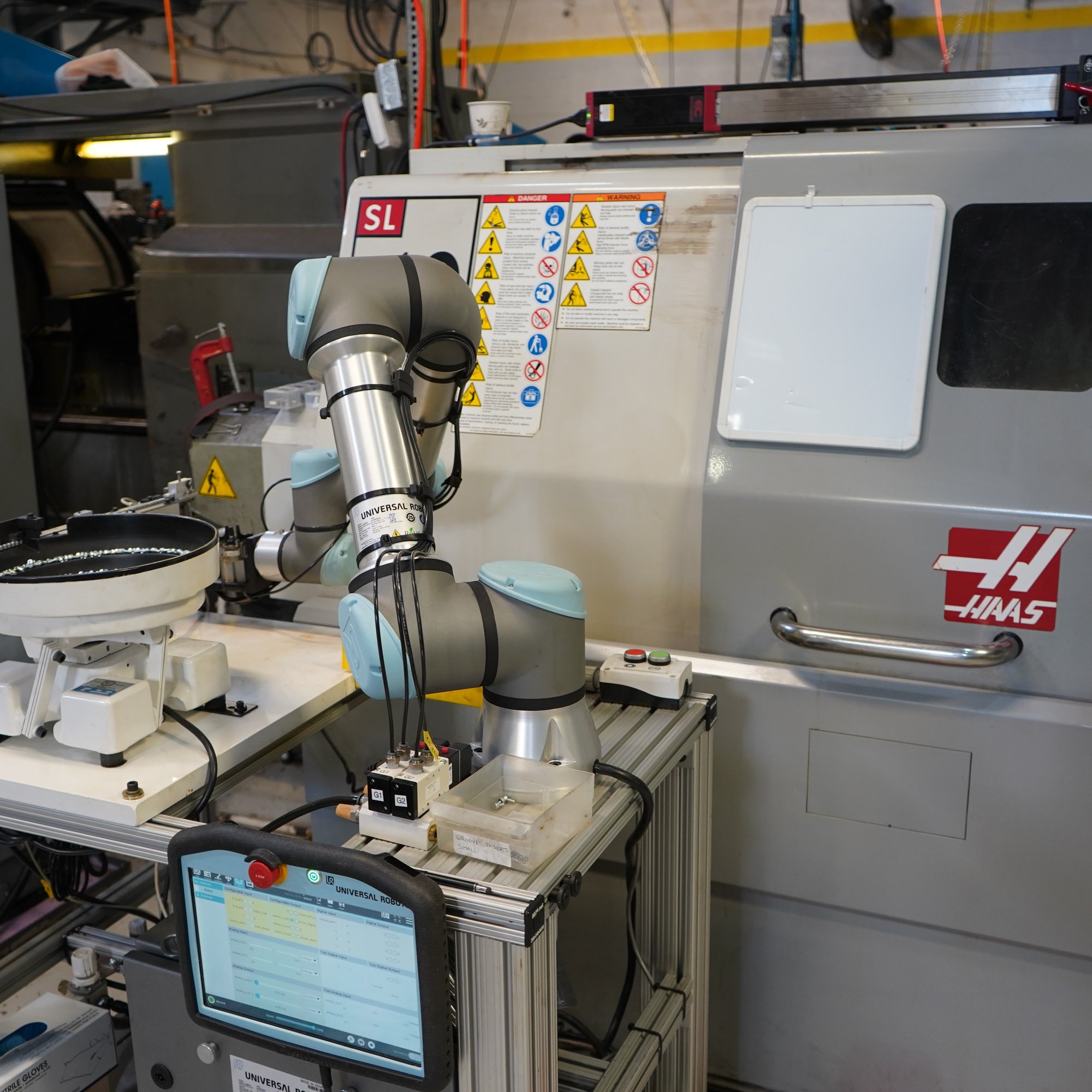
マシンテンディングオペレーションを自動化することで、一人のオペレーターが複数のcobotの品質管理と部品管理を行うことができます。これにより、スタッフはより付加価値の高い業務に従事できるようになり、パフォーマンスの高い人材を最大限に活用することで、総合的な労働効率(OLE)が向上します。

労働力を強化する
さらに詳しく
Robotiqのソリューションにより、熟練した従業員を、自律性と多様性を提供する価値の高い作業に集中させることができます。構成はユーザーフレンドリーで、従業員が新しいスキルを開発できるようにします。さらに、プログラムは従来のプログラミングよりも75%速く作成されます。

適応性の促進
さらに詳しく
このソリューションの実績のある標準化されたアプローチは、複雑な問題に事前に対処することで、実装をスピードアップします。モデル、タイプ、年齢に関係なく、すべてのマシンとの互換性を保証し、普遍的なソリューション、言語、トレーニングを提供することで、スケーリングを簡素化します。






-3.jpg?width=1612&height=1612&name=Vincent+Hugo%203%20(3)-3.jpg)



-1.png?width=932&height=600&name=eLearning-logo%20en%20tete%20noir%20@2x%20(1)-1.png)


