


Artificial intelligence is moving fast. Large language models can write emails, summarize reports,...

-1.jpg?width=2000&name=2F140-Wrist-Camera-Machine-Tending-Walt-Machine-12%20(2)-1.jpg)
Caméra de poignet
ÉCLAIRAGE INTÉGRÉ
MISE AU POINT
CHAMP DE VISION

Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Artificial intelligence is moving fast. Large language models can write emails, summarize reports,...

Artificial intelligence is transforming robotics. Vision systems can identify objects, machine...

Across many manufacturing facilities, one role remains surprisingly difficult to fill: palletizing....
.jpg)
At the end of the production line, everything comes together. Boxes are sealed, labeled, and ready...

Increasing output by 50% without adding floor space sounds unrealistic for most manufacturers. That...

Industrial manufacturers often struggle with capacity, labor strain, and consistency. At Korea...
Artificial intelligence can generate actions. Physical AI hardware determines whether those actions...
At Sennheiser Manufacturing USA in Albuquerque, precision is non-negotiable. Every week, the...
Physical AI has moved past proof-of-concept. Large models, better simulation, and faster hardware...

After more than 300 palletizing deployments in 2025—and over 900 Lean Palletizing units now running...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day


Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Artificial intelligence is moving fast. Large language models can write emails, summarize reports,...
Artificial intelligence is transforming robotics. Vision systems can identify objects, machine...
Across many manufacturing facilities, one role remains surprisingly difficult to fill: palletizing....
At the end of the production line, everything comes together. Boxes are sealed, labeled, and ready...
Increasing output by 50% without adding floor space sounds unrealistic for most manufacturers. That...
Industrial manufacturers often struggle with capacity, labor strain, and consistency. At Korea...
Artificial intelligence can generate actions. Physical AI hardware determines whether those actions...
At Sennheiser Manufacturing USA in Albuquerque, precision is non-negotiable. Every week, the...
Physical AI has moved past proof-of-concept. Large models, better simulation, and faster hardware...
After more than 300 palletizing deployments in 2025—and over 900 Lean Palletizing units now running...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
D'une conception méticuleuse à une intégration parfaite et un fonctionnement optimisé, la caméra de poignet Robotiq est la clé pour débloquer des capacités de vision avancées, améliorant ainsi la productivité et l'efficacité dans divers environnements manufacturiers.



Robotiq has a variety of technical information available for your solution.
Artificial intelligence is moving fast. Large language models can write emails, summarize reports,...
Artificial intelligence is transforming robotics. Vision systems can identify objects, machine...
Across many manufacturing facilities, one role remains surprisingly difficult to fill: palletizing....
At the end of the production line, everything comes together. Boxes are sealed, labeled, and ready...
Increasing output by 50% without adding floor space sounds unrealistic for most manufacturers. That...
Industrial manufacturers often struggle with capacity, labor strain, and consistency. At Korea...
Artificial intelligence can generate actions. Physical AI hardware determines whether those actions...
At Sennheiser Manufacturing USA in Albuquerque, precision is non-negotiable. Every week, the...
Physical AI has moved past proof-of-concept. Large models, better simulation, and faster hardware...
After more than 300 palletizing deployments in 2025—and over 900 Lean Palletizing units now running...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Artificial intelligence is moving fast. Large language models can write emails, summarize reports,...
Artificial intelligence is transforming robotics. Vision systems can identify objects, machine...
Across many manufacturing facilities, one role remains surprisingly difficult to fill: palletizing....
At the end of the production line, everything comes together. Boxes are sealed, labeled, and ready...
Increasing output by 50% without adding floor space sounds unrealistic for most manufacturers. That...
Industrial manufacturers often struggle with capacity, labor strain, and consistency. At Korea...
Artificial intelligence can generate actions. Physical AI hardware determines whether those actions...
At Sennheiser Manufacturing USA in Albuquerque, precision is non-negotiable. Every week, the...
Physical AI has moved past proof-of-concept. Large models, better simulation, and faster hardware...
After more than 300 palletizing deployments in 2025—and over 900 Lean Palletizing units now running...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
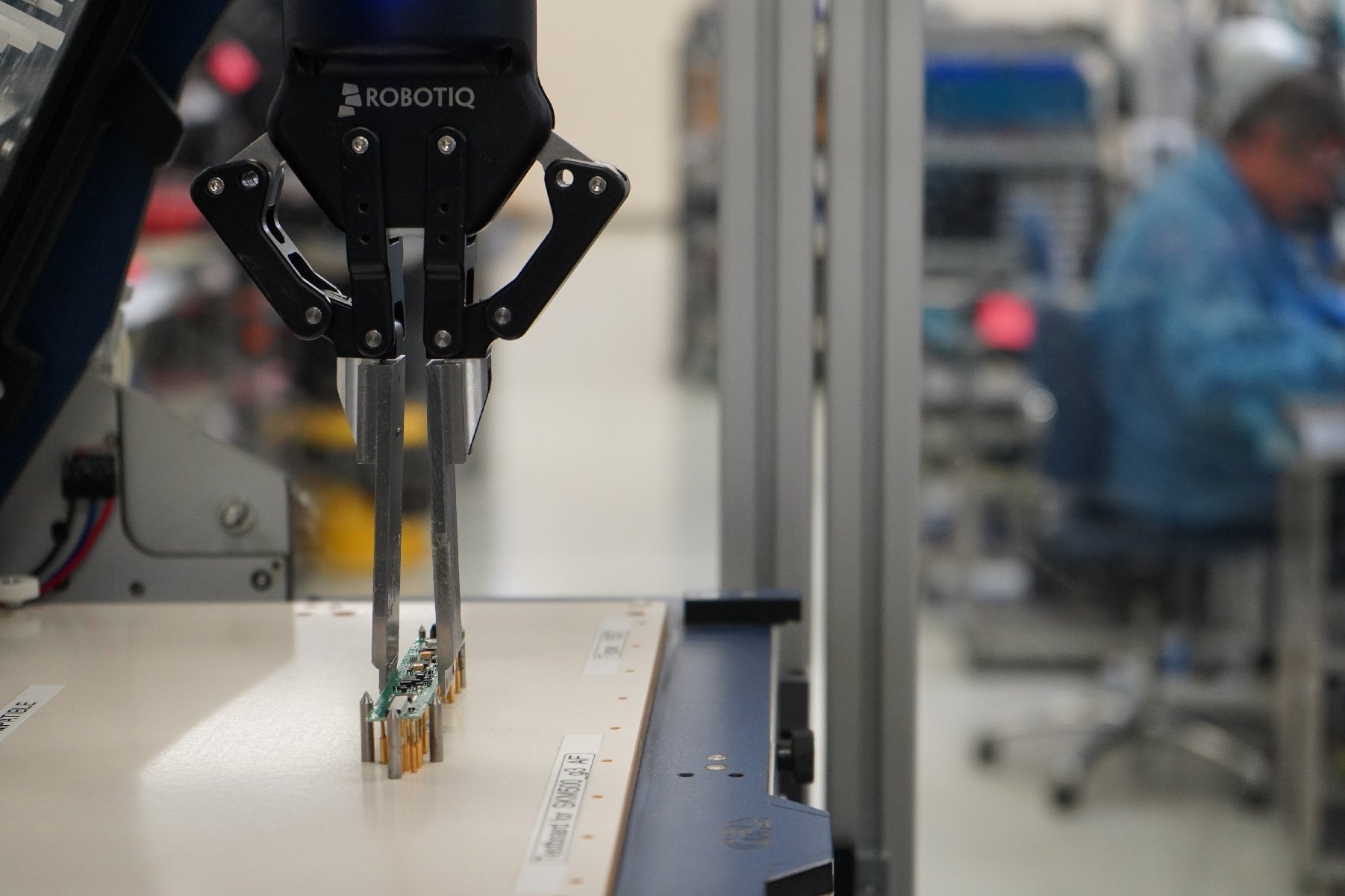
La caméra de poignet est très flexible et peut localiser les pièces dans un large champ de vision. Chaque fois qu’il y a une nouvelle serrure à assembler, nous pouvons facilement programmer une nouvelle pièce.

Ingénieur mécanique, Assa Abloy
Cette caméra règle un problème auquel tous les fabricants sont confrontés : saisir des pièces qui sont présentées dans toutes sortes de positions.

Gestionnaire procédés et qualité, Beyerdynamic
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Artificial intelligence is moving fast. Large language models can write emails, summarize reports,...
Artificial intelligence is transforming robotics. Vision systems can identify objects, machine...
Across many manufacturing facilities, one role remains surprisingly difficult to fill: palletizing....
At the end of the production line, everything comes together. Boxes are sealed, labeled, and ready...
Increasing output by 50% without adding floor space sounds unrealistic for most manufacturers. That...
Industrial manufacturers often struggle with capacity, labor strain, and consistency. At Korea...
Artificial intelligence can generate actions. Physical AI hardware determines whether those actions...
At Sennheiser Manufacturing USA in Albuquerque, precision is non-negotiable. Every week, the...
Physical AI has moved past proof-of-concept. Large models, better simulation, and faster hardware...
After more than 300 palletizing deployments in 2025—and over 900 Lean Palletizing units now running...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Artificial intelligence is moving fast. Large language models can write emails, summarize reports,...
Artificial intelligence is transforming robotics. Vision systems can identify objects, machine...
Across many manufacturing facilities, one role remains surprisingly difficult to fill: palletizing....
At the end of the production line, everything comes together. Boxes are sealed, labeled, and ready...
Increasing output by 50% without adding floor space sounds unrealistic for most manufacturers. That...
Industrial manufacturers often struggle with capacity, labor strain, and consistency. At Korea...
Artificial intelligence can generate actions. Physical AI hardware determines whether those actions...
At Sennheiser Manufacturing USA in Albuquerque, precision is non-negotiable. Every week, the...
Physical AI has moved past proof-of-concept. Large models, better simulation, and faster hardware...
After more than 300 palletizing deployments in 2025—and over 900 Lean Palletizing units now running...
| Poids | 0,16 kg (0,35 lb) |
|---|---|
| Dimensions | 87,5 x 75 x 22,4 mm (3,4 x 3 x 0,9 po.) |
| Capteur et optique | Capteur couleur de 5 mégapixels, mise au point électronique |
| Champ de vision minimum | 10 x 7,5 cm (3,9 x 3 po) |
| Champ de vision maximum* | 71 x 54 cm (28 x 21,3 po) |
| Taille minimale de l'objet (% du champ de vision) | 10% |
| Taille maximale de l'objet (% du champ de vision) | 60% |
| Éclairage intégré | 6 DEL à lumière blanche diffuse |
| Plage de mise au point | 70 mm à ∞ |
| Compatibilité | Universal Robots |









.png?width=257&height=171&name=Frame%2011%20(2).png)