
Part 1 of 2, Physical AI: The DARPA Legacy & the Road Ahead. What the DARPA Robotics Challenge...


MAX PAYLOAD
IP RATING
STROKE

Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Part 1 of 2, Physical AI: The DARPA Legacy & the Road Ahead. What the DARPA Robotics Challenge...
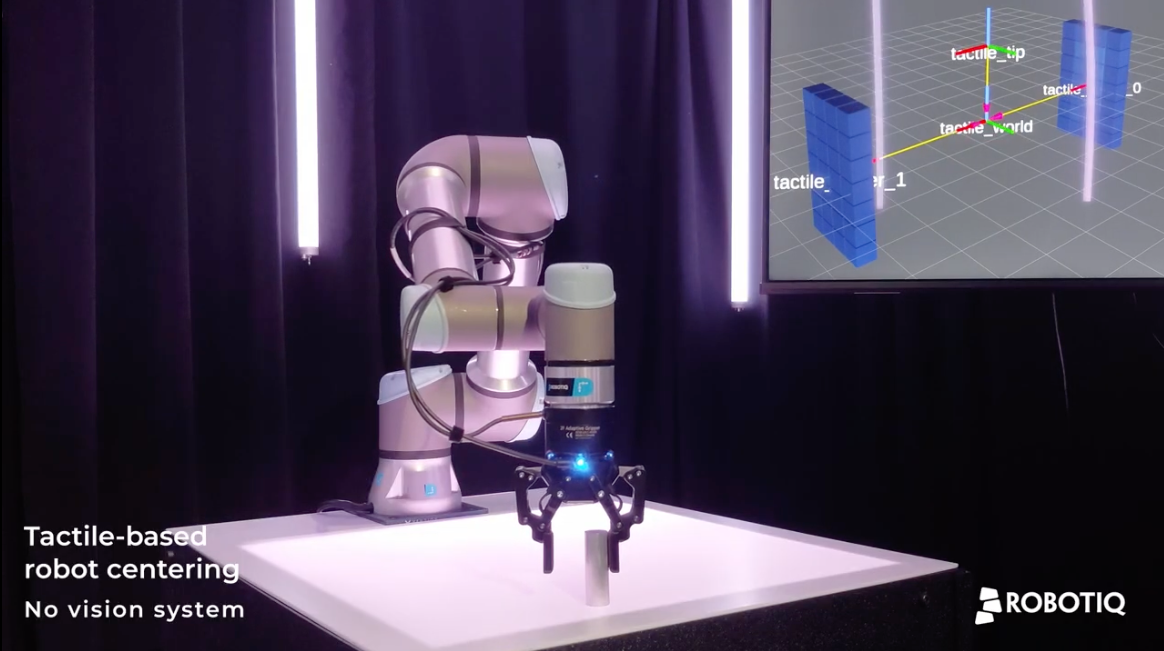
A robot does not always grip a part exactly where intended. Vision may guide the gripper close, but...

If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...

In the heart of Provence, a small French bottling company is proving that automation isn't just for...
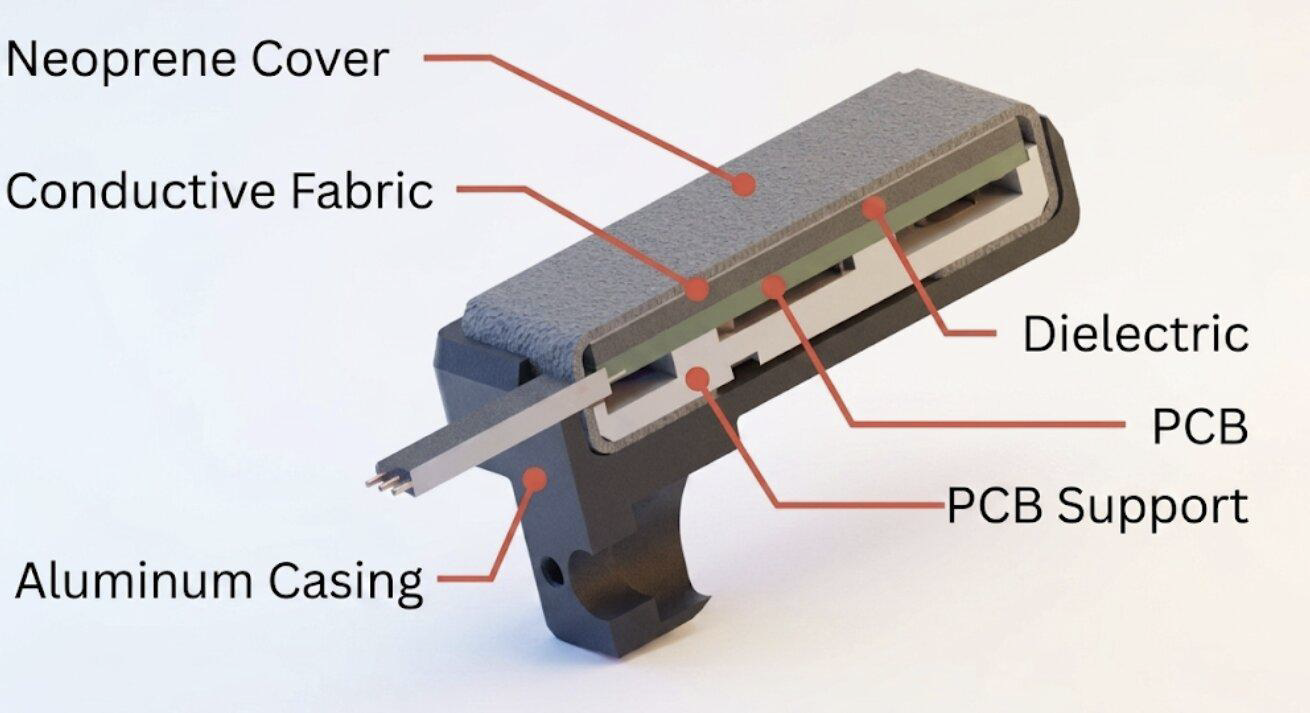
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
.png)
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...

Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...

Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day


Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Part 1 of 2, Physical AI: The DARPA Legacy & the Road Ahead. What the DARPA Robotics Challenge...
A robot does not always grip a part exactly where intended. Vision may guide the gripper close, but...
If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Robotiq’s Hand-E Gripper empowers users to take control. A simple configuration with minimal programming changes is all that is necessary for changeovers. By using a single gripper for multiple tasks, manufacturers can save time and money.



Robotiq has a variety of technical information available for your solution.
Part 1 of 2, Physical AI: The DARPA Legacy & the Road Ahead. What the DARPA Robotics Challenge...
A robot does not always grip a part exactly where intended. Vision may guide the gripper close, but...
If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Part 1 of 2, Physical AI: The DARPA Legacy & the Road Ahead. What the DARPA Robotics Challenge...
A robot does not always grip a part exactly where intended. Vision may guide the gripper close, but...
If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
What Robotiq’s grippers have to offer is a step beyond any of the competitors.

Manufacturing Engineering Manager, Usinatech
We’re able to connect the grippers directly to the robot’s wrist, get feedback on the position and force, and check if there’s a part where there should be one—and whether it’s the right part.

R&D Manager, Fusion OEM
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Part 1 of 2, Physical AI: The DARPA Legacy & the Road Ahead. What the DARPA Robotics Challenge...
A robot does not always grip a part exactly where intended. Vision may guide the gripper close, but...
If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Part 1 of 2, Physical AI: The DARPA Legacy & the Road Ahead. What the DARPA Robotics Challenge...
A robot does not always grip a part exactly where intended. Vision may guide the gripper close, but...
If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
| Payload | 7 kg (15 lb) |
|---|---|
| Stroke | 50 mm (2 in) or 100 mm (3.94 in) |
| Gripper weight | 1 kg (2 lb) or 1.1 kg (2.4 lb) |
| Energy source | Electricity, connected to robot wrist (24 V, 2 A) |
| Control parameters | Object detection, position, speed and force |
| Warranty | 5 000 000 cycles |
| Grip force | 20 to 185 N (4.5 to 41 lbf) |
| Closing speed | 150 mm/s (5.9 in/s) |
| Repeatability | 0.025 mm (0.001 in) |
| Ingress protection (IP) rating | IP67 |
| Operating temperature | -10 to 50 °C (14 to 122 °F) |
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Part 1 of 2, Physical AI: The DARPA Legacy & the Road Ahead. What the DARPA Robotics Challenge...
A robot does not always grip a part exactly where intended. Vision may guide the gripper close, but...
If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
See how the 2-Finger Adaptive Robot Gripper helped triple Voodoo Manufacturing's 3D printing production
The ROI was a slam dunk from the beginning, from how much labor it saved. The installation process was the smoothest install of any piece of equipment I have had to experience in 28 years.
Vice-President, Cascade
coffee

Norem ipsum dolor sit amet, consectetur adipiscing elit. Etiam eu turpis molestie, dictum est a, mattis tellus. Sed dignissim, metus nec fringilla accumsan, risus sem sollicitudin lacus, ut interdum tellus elit sed risus. Maecenas eget condimentum velit, sit amet feugiat lectus.
Class aptent taciti sociosqu ad litora torquent per conubia nostra, per inceptos himenaeos. Praesent auctor purus luctus enim egestas, ac scelerisque ante pulvinar.
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
|---|---|---|---|
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Robotiq adaptive grippers have become a standard in robotics research, widely used in labs for learning-based manipulation and Physical AI development. Their availability, technical support, and integration ecosystem make them a go-to manipulation platform for teams focused on rapid experimentation and data collection. By offering fast deployment, reliable fleet integration and access to control, Robotiq grippers enable engineers to focus on building intelligence and real-world applications rather than developing custom hardware.
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Part 1 of 2, Physical AI: The DARPA Legacy & the Road Ahead. What the DARPA Robotics Challenge...
A robot does not always grip a part exactly where intended. Vision may guide the gripper close, but...
If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
See how the 2-Finger Adaptive Robot Gripper helped triple Voodoo Manufacturing's 3D printing production
The ROI was a slam dunk from the beginning, from how much labor it saved. The installation process was the smoothest install of any piece of equipment I have had to experience in 28 years.
Vice-President, Cascade
coffee
Norem ipsum dolor sit amet, consectetur adipiscing elit. Etiam eu turpis molestie, dictum est a, mattis tellus. Sed dignissim, metus nec fringilla accumsan, risus sem sollicitudin lacus, ut interdum tellus elit sed risus. Maecenas eget condimentum velit, sit amet feugiat lectus.
Class aptent taciti sociosqu ad litora torquent per conubia nostra, per inceptos himenaeos. Praesent auctor purus luctus enim egestas, ac scelerisque ante pulvinar.
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
|---|---|---|---|
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
MAX PAYLOAD
GRIP FORCE
STROKE
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Part 1 of 2, Physical AI: The DARPA Legacy & the Road Ahead. What the DARPA Robotics Challenge...
A robot does not always grip a part exactly where intended. Vision may guide the gripper close, but...
If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Robotiq's 2-Finger Grippers combine precision, efficiency, and versatility to optimize handling in manufacturing. Their seamless integration and smart control capabilities enhance productivity and reduce downtime. Durable and low-maintenance, they're adaptable for a wide variety of applications, where they significantly boost operational efficiency.

Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Part 1 of 2, Physical AI: The DARPA Legacy & the Road Ahead. What the DARPA Robotics Challenge...
A robot does not always grip a part exactly where intended. Vision may guide the gripper close, but...
If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Part 1 of 2, Physical AI: The DARPA Legacy & the Road Ahead. What the DARPA Robotics Challenge...
A robot does not always grip a part exactly where intended. Vision may guide the gripper close, but...
If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
When customers come in, you look like you’re on the cutting edge of technology.

President, Walt Machine Inc.
Robotiq has a unique solution: a reliable gripper that can manage part changeovers quickly, which is important for our high-mix, high-volume production.

Manufacturing Engineer, Sennheiser Manufacturing USA
The 2F-85 is very intuitive in terms of force, opening, and activation. For everything pick-and-place-related, you can mount the fingertips however you want.

Director of Continuous Improvement, APN
We needed a very flexible gripper with which we could easily monitor force and the distance between two points. The 2F-85 was an obvious choice.

CEO, KPE Engineering, Diehl
I didn’t have particular programming skills but I found it very easy, with some knowledge of logic, to program the robot, the 2-Finger Adaptive Gripper, and the Wrist Camera.

Vice-President, Cascade
Mechanical Design Engineer, Assa Abloy
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Part 1 of 2, Physical AI: The DARPA Legacy & the Road Ahead. What the DARPA Robotics Challenge...
A robot does not always grip a part exactly where intended. Vision may guide the gripper close, but...
If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Part 1 of 2, Physical AI: The DARPA Legacy & the Road Ahead. What the DARPA Robotics Challenge...
A robot does not always grip a part exactly where intended. Vision may guide the gripper close, but...
If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
| Payload | 5 kg (11 lb) |
|---|---|
| Gripper weight | 1 kg (2 lb) |
| Energy source | Electricity, connected to robot wrist (24 V, 2 A) |
| Control parameters | Object detection, position, speed and force |
| Warranty | 2 000 000 cycles |
| Stroke | 85 mm (3.3 in.) |
| Grip force | 20 to 235 N (4.5 to 50 lbf) |
| Closing speed | 20 to 150 mm/s (0.8 to 5.9 in./s) |
| Repeatability | 0.05 mm (0.002 in) |
| Ingress protection (IP) rating | IP40 |
| Operating temperature | -10 to 50 °C (14 to 122 °F) |
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Part 1 of 2, Physical AI: The DARPA Legacy & the Road Ahead. What the DARPA Robotics Challenge...
A robot does not always grip a part exactly where intended. Vision may guide the gripper close, but...
If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
| Payload | 2.5 kg (5.5 lb) |
|---|---|
| Gripper weight | 1 kg (2 lb) |
| Energy source | Electricity, connected to robot wrist (24 V, 2 A) |
| Control parameters | Object detection, position, speed and force |
| Warranty | 2 000 000 cycles |
| Stroke | 140 mm (5.5 in.) |
| Grip force | 10 to 125 N (2 to 25 lbf) |
| Closing speed | 30 to 250 mm/s (1.2 to 9.8 in./s) |
| Repeatability | 0.08 mm (0.003 in) |
| Ingress protection (IP) rating | IP40 |
| Operating temperature | -10 to 50 °C (14 to 122 °F) |
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Part 1 of 2, Physical AI: The DARPA Legacy & the Road Ahead. What the DARPA Robotics Challenge...
A robot does not always grip a part exactly where intended. Vision may guide the gripper close, but...
If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
See how the 2-Finger Adaptive Robot Gripper helped triple Voodoo Manufacturing's 3D printing production
The ROI was a slam dunk from the beginning, from how much labor it saved. The installation process was the smoothest install of any piece of equipment I have had to experience in 28 years.
Vice-President, Cascade
coffee
Norem ipsum dolor sit amet, consectetur adipiscing elit. Etiam eu turpis molestie, dictum est a, mattis tellus. Sed dignissim, metus nec fringilla accumsan, risus sem sollicitudin lacus, ut interdum tellus elit sed risus. Maecenas eget condimentum velit, sit amet feugiat lectus.
Class aptent taciti sociosqu ad litora torquent per conubia nostra, per inceptos himenaeos. Praesent auctor purus luctus enim egestas, ac scelerisque ante pulvinar.
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
|---|---|---|---|
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Robotiq adaptive grippers have become a standard in robotics research, widely used in labs for learning-based manipulation and Physical AI development. Their availability, technical support, and integration ecosystem make them a go-to manipulation platform for teams focused on rapid experimentation and data collection. By offering fast deployment, reliable fleet integration and access to control, Robotiq grippers enable engineers to focus on building intelligence and real-world applications rather than developing custom hardware.

Robotiq's 2-Finger Grippers combine precision, efficiency, and versatility to optimize handling in manufacturing. Their seamless integration and smart control capabilities enhance productivity and reduce downtime. Durable and low-maintenance, they're adaptable for a wide variety of applications, where they significantly boost operational efficiency.



Robotiq has a variety of technical information available for your solution.
Part 1 of 2, Physical AI: The DARPA Legacy & the Road Ahead. What the DARPA Robotics Challenge...
A robot does not always grip a part exactly where intended. Vision may guide the gripper close, but...
If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
MAX PAYLOAD
IP RATING
STROKE (DIAMETER)



Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Part 1 of 2, Physical AI: The DARPA Legacy & the Road Ahead. What the DARPA Robotics Challenge...
A robot does not always grip a part exactly where intended. Vision may guide the gripper close, but...
If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day

Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Part 1 of 2, Physical AI: The DARPA Legacy & the Road Ahead. What the DARPA Robotics Challenge...
A robot does not always grip a part exactly where intended. Vision may guide the gripper close, but...
If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Robotiq’s Hand-E C10 Gripper is ideal for tight spaces and industrial environments. Versatile with easily changeable fingertips and unlimited grasp options, it's plug & play for simple programming.


Robotiq has a variety of technical information available for your solution.
Part 1 of 2, Physical AI: The DARPA Legacy & the Road Ahead. What the DARPA Robotics Challenge...
A robot does not always grip a part exactly where intended. Vision may guide the gripper close, but...
If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Part 1 of 2, Physical AI: The DARPA Legacy & the Road Ahead. What the DARPA Robotics Challenge...
A robot does not always grip a part exactly where intended. Vision may guide the gripper close, but...
If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
What Robotiq’s grippers have to offer is a step beyond any of the competitors.
Manufacturing Engineering Manager, Usinatech
We’re able to connect the grippers directly to the robot’s wrist, get feedback on the position and force, and check if there’s a part where there should be one—and whether it’s the right part.
R&D Manager, Fusion OEM
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Part 1 of 2, Physical AI: The DARPA Legacy & the Road Ahead. What the DARPA Robotics Challenge...
A robot does not always grip a part exactly where intended. Vision may guide the gripper close, but...
If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Part 1 of 2, Physical AI: The DARPA Legacy & the Road Ahead. What the DARPA Robotics Challenge...
A robot does not always grip a part exactly where intended. Vision may guide the gripper close, but...
If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
| Payload | 10 kg (22 lbs) |
|---|---|
| Gripper weight | 1.7 kg (3.7 lbs) |
| Energy source | Electricity, connected to robot wrist (24 V, 2 A) |
| Control parameters | Object detection, position, speed and force |
| Warranty | 5 000 000 cycles |
| Stroke (Diameter) | 40 mm (1.57 in) |
| Grip force (per finger) | 25N to 175 N (5.6 to 39.34 lbf) |
| Closing speed | 14 to 107 mm/s (0.55 to 4.21 in/s) |
| Repeatability | 0.04 mm (0.002 in) |
| Ingress protection (IP) rating | IP67 |
| Operating temperature | -10 to 50 °C (14 to 122 °F) |
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Part 1 of 2, Physical AI: The DARPA Legacy & the Road Ahead. What the DARPA Robotics Challenge...
A robot does not always grip a part exactly where intended. Vision may guide the gripper close, but...
If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
See how the 2-Finger Adaptive Robot Gripper helped triple Voodoo Manufacturing's 3D printing production
The ROI was a slam dunk from the beginning, from how much labor it saved. The installation process was the smoothest install of any piece of equipment I have had to experience in 28 years.
Vice-President, Cascade
coffee
Norem ipsum dolor sit amet, consectetur adipiscing elit. Etiam eu turpis molestie, dictum est a, mattis tellus. Sed dignissim, metus nec fringilla accumsan, risus sem sollicitudin lacus, ut interdum tellus elit sed risus. Maecenas eget condimentum velit, sit amet feugiat lectus.
Class aptent taciti sociosqu ad litora torquent per conubia nostra, per inceptos himenaeos. Praesent auctor purus luctus enim egestas, ac scelerisque ante pulvinar.
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
|---|---|---|---|
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
MAX PAYLOAD
GRIP FORCE
STROKE

Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Part 1 of 2, Physical AI: The DARPA Legacy & the Road Ahead. What the DARPA Robotics Challenge...
A robot does not always grip a part exactly where intended. Vision may guide the gripper close, but...
If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day

Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Part 1 of 2, Physical AI: The DARPA Legacy & the Road Ahead. What the DARPA Robotics Challenge...
A robot does not always grip a part exactly where intended. Vision may guide the gripper close, but...
If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
The 3-Finger Gripper is a perfect blend of durability, quick integration, and versatile functionality. Its robust construction is designed for the toughest industrial applications, offering seamless compatibility with a range of robots. Our intuitive programming interface ensures swift setup, while its diverse gripping capabilities and precise finger control cater to a wide array of operational needs.



Robotiq has a variety of technical information available for your solution.
Part 1 of 2, Physical AI: The DARPA Legacy & the Road Ahead. What the DARPA Robotics Challenge...
A robot does not always grip a part exactly where intended. Vision may guide the gripper close, but...
If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Part 1 of 2, Physical AI: The DARPA Legacy & the Road Ahead. What the DARPA Robotics Challenge...
A robot does not always grip a part exactly where intended. Vision may guide the gripper close, but...
If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
Cases palletized in a day
Cases palletized in a day
Cases palletized in a day
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Part 1 of 2, Physical AI: The DARPA Legacy & the Road Ahead. What the DARPA Robotics Challenge...
A robot does not always grip a part exactly where intended. Vision may guide the gripper close, but...
If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
| Payload | 10 kg (22 lb) |
|---|---|
| Tooling weight | 2.3 kg (5 lb) |
| Energy source | Electricity |
| Control parameters | Object detection, position, speed and force |
| Stroke | 155 mm (6 in.) |
| Grip force | 30 to 70 N (6.7 to 15.7 lbf) |
| Closing speed | 22 to 110 mm/s (0.9 in. to 4.3 in./s) |
| Repeatability | 0.05 mm (0.2 in.) |
| Operating temperature | -10 to 50 °C (14 to 122 °F) |
| Cobot compatibility | Universal Robots |
Robotiq’s Hand-E Gripper is simple to integrate in your production environment and easy for workers of all skill levels to use—no robotics experience required.Install your adaptive gripper in just a few minutes, thanks to our Plug + Play gripper kits. Then use our intuitive software interface to program directly on your robot’s touchscreen.
Robotiq has a variety of technical information available for your solution.
Part 1 of 2, Physical AI: The DARPA Legacy & the Road Ahead. What the DARPA Robotics Challenge...
A robot does not always grip a part exactly where intended. Vision may guide the gripper close, but...
If you've been using Hand-E Adaptive Gripper on your production line, you already know why it's...
In the heart of Provence, a small French bottling company is proving that automation isn't just for...
Read the full technical article from Jennifer Kwiatkowski on Tech Brief. For teams building...
Manual palletizing is one of the most common, and most overlooked, inefficiencies in food...
What does it look like when a single cobot workcell solves a real problem, earns full ROI in under...
Getting a palletizing project done right has always depended on having the right information at the...
Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T...
Most manufacturers who want to automate palletizing face the same problem. Getting a straight...
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) |
|---|---|
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) |
*Calculated for the use of silicon covered fingertips to grip a steel object, at a low robot acceleration.
See how the 2-Finger Adaptive Robot Gripper helped triple Voodoo Manufacturing's 3D printing production
The ROI was a slam dunk from the beginning, from how much labor it saved. The installation process was the smoothest install of any piece of equipment I have had to experience in 28 years.
Vice-President, Cascade
coffee
Norem ipsum dolor sit amet, consectetur adipiscing elit. Etiam eu turpis molestie, dictum est a, mattis tellus. Sed dignissim, metus nec fringilla accumsan, risus sem sollicitudin lacus, ut interdum tellus elit sed risus. Maecenas eget condimentum velit, sit amet feugiat lectus.
Class aptent taciti sociosqu ad litora torquent per conubia nostra, per inceptos himenaeos. Praesent auctor purus luctus enim egestas, ac scelerisque ante pulvinar.
Qorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc vulputate libero et velit interdum, ac aliquet odio mattis.
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
|---|---|---|---|
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |
| Stroke | 50 mm (2.0 in) | 50 mm (2.0 in) | 50 mm (2.0 in) |






















.png?width=257&height=171&name=Frame%2011%20(3).png)

.png?width=257&height=171&name=Frame%2011%20(2).png)