

年間140万本のネジを自動化
かつては毎日何百もの製品に4,000本のネジを手作業で締め付けていた作業が、今では完全に自動化され、生産ラインから最も身体的に負担の大きかった手作業を排除しました。

施設内27か所のアクティブステーション
1つのパイロットセルから27の生産ステーションへと拡大し、単一のスクリュードライビングセルとして始まったものが、グリッパーからスクリュードライバーまで幅広いRobotiq製品を使ったマルチセル自動化プログラムへと成長しました。

3件から0件へ 回旋筋腱板損傷
2年間で3件の事故が発生した後、繰り返しの手動組立動作を自動化することで、SELの生産量増加とともに蓄積されていた人間工学的な身体負担を解消しました。
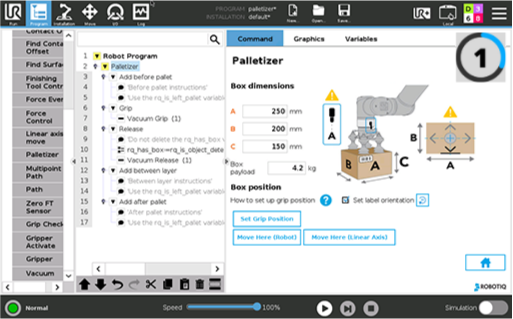
Step 1 - Box dimensions, weight and orientation
Step 1 - Box dimensions, weight and orientation
Step 1 - Box dimensions, weight and orientation





